On Sunday the 24th May 2015, I carried out a test flight of the Pi in the sky high altitude balloon tracker for our local council. There are currently over 10 schools constructing payloads around this tracker which should be launching in the next couple of months. A couple of my experimental trackers also hitched a ride on the flight to test out, as well as another backup tracker.
I was joined by Will to help with the launch, tracking and recovery. After a quick stop for breakfast and to check the predictions one last time, we met Steve up at the Elsworth launch site at Cambridge. Steve was also trialling out live streaming the launch over 4G, which turned out to be very successful.
Shortly after arriving, we powered up all of the payloads, ensured they had a GPS fix and were transmitting correctly, then joined them together with the 3ft rocketman parachute to form a train.
Balloon — 5m — Parachute —– 10m —– ECC1 — 5m — CHEAPO – 2m – CS4
We then began filling the Hwoyee 1200g balloon with about 3.6m³ of helium. The lift was checked by attaching a 2500g weight to the balloon and filling until it achieved neutral buoyancy. The balloon was then sealed off at the neck and joined to the train using cable ties and duct tape.

Image credit Steve Randall
After Steve coordinated with local air traffic control and the rocketry club in the next field, it was time to launch. The wind was picking up a little bit, so the launch was a little more violent than usual. Will and I ran along with the payloads to match the speed of the wind, and then released them when the balloon was straight above us.
We then shot off in the chase car to wait in a car park in Royston until the burst. This ensured we had good 3G/4G signal to run predictions and fast access to the main roads once we had a predicted landing site.
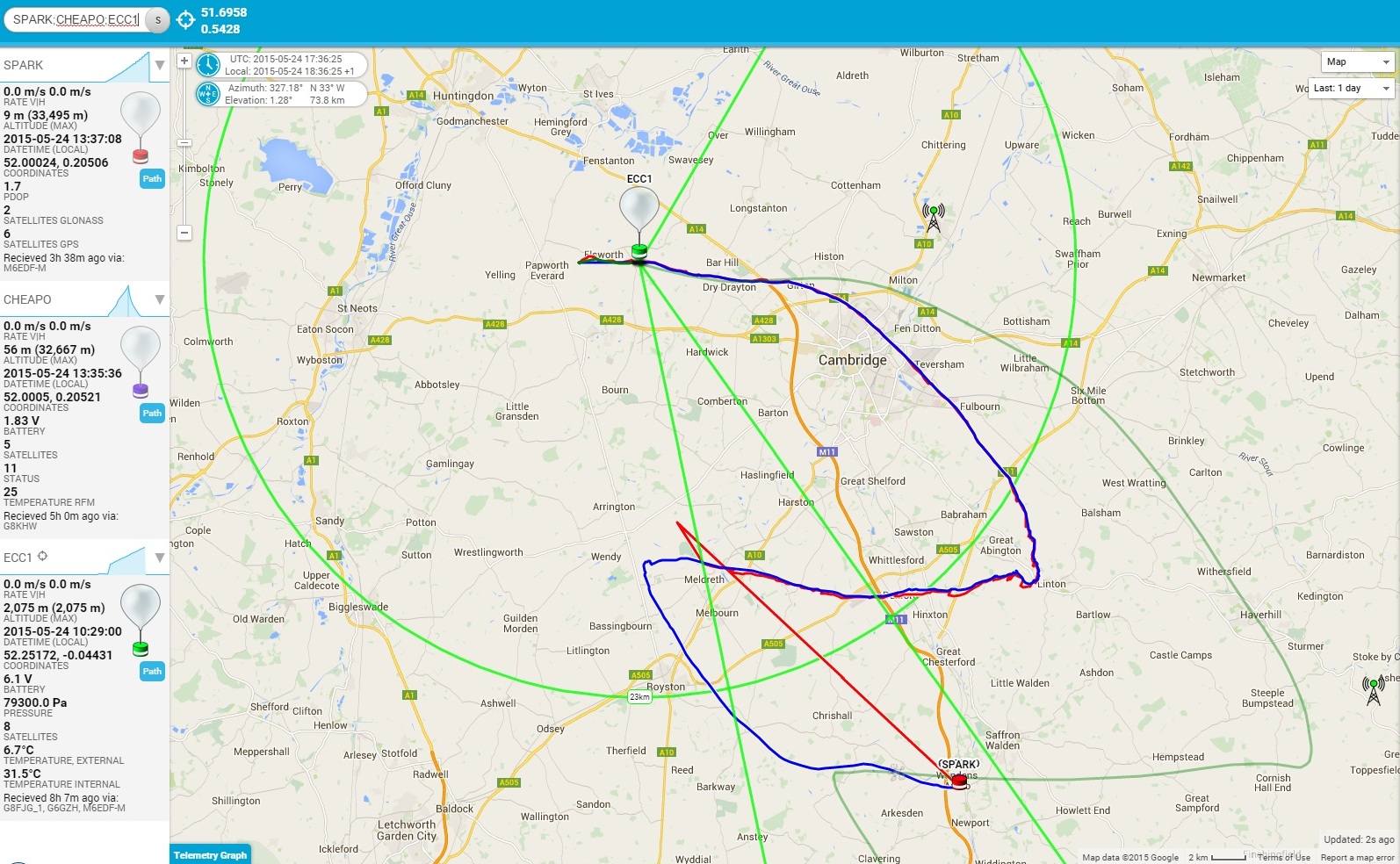
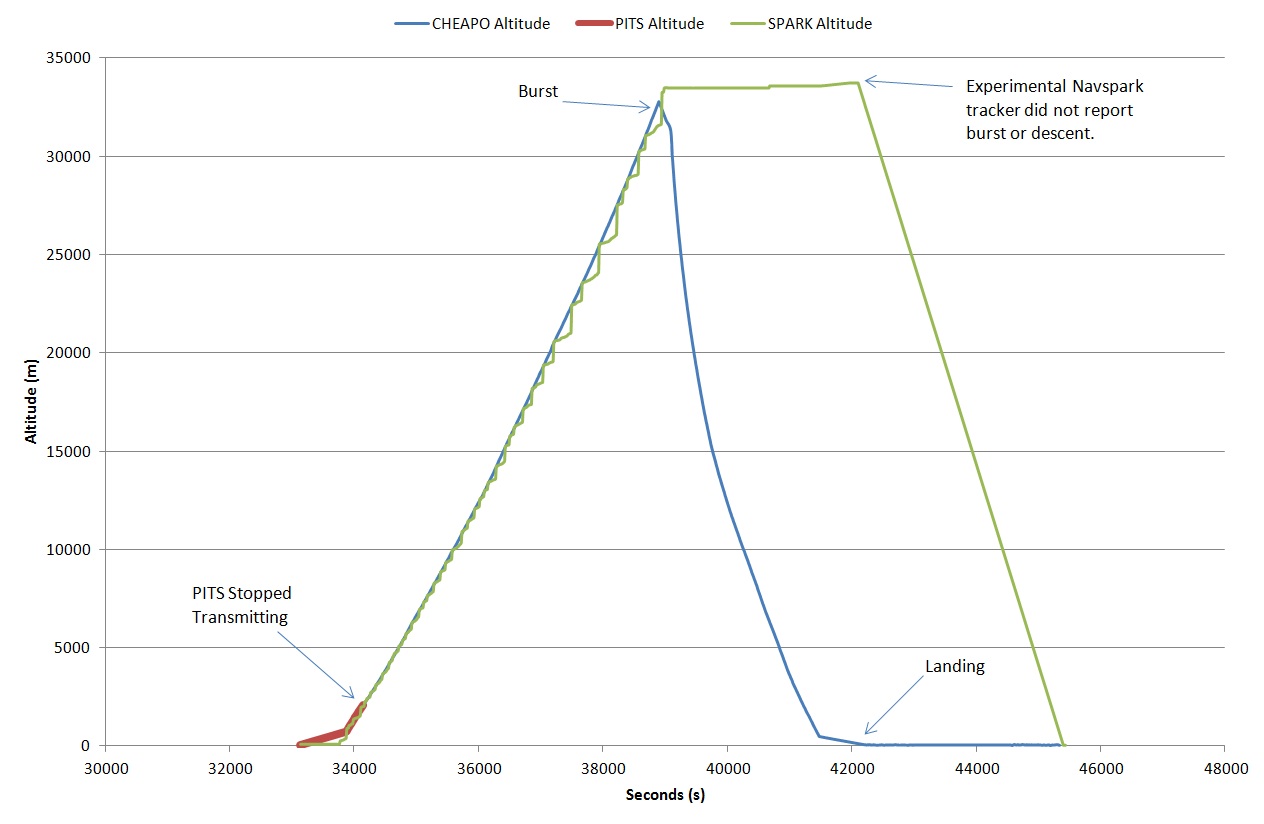
Unfortunately shortly after launch ECC1’s signal dropped to a single carrier (as opposed to the normal alternating frequency of RTTY), this was a pretty solid indication that the tracker had crashed. We continued receiving updates from SPARK and CHEAPO for the duration of the ascent. When the balloon eventually burst at 32759m altitude, we waited for a few more updates of the descent from CHEAPO before heading out to the predicted landing site. SPARK once again however failed to report the burst or descent, and carried on “floating” at a roughly steady altitude.
Once we arrived at our predicted landing site the flight had landed, and the signals from all 3 payloads were visible and audible, however too weak to decode. After 15 minutes or so of trying different antennas and tweaking decoder settings, we decided to head out further west in pursuit of a stronger signal. Around this point we saw a bunch of updates appear on the tracker from Steve, and headed to the new location.
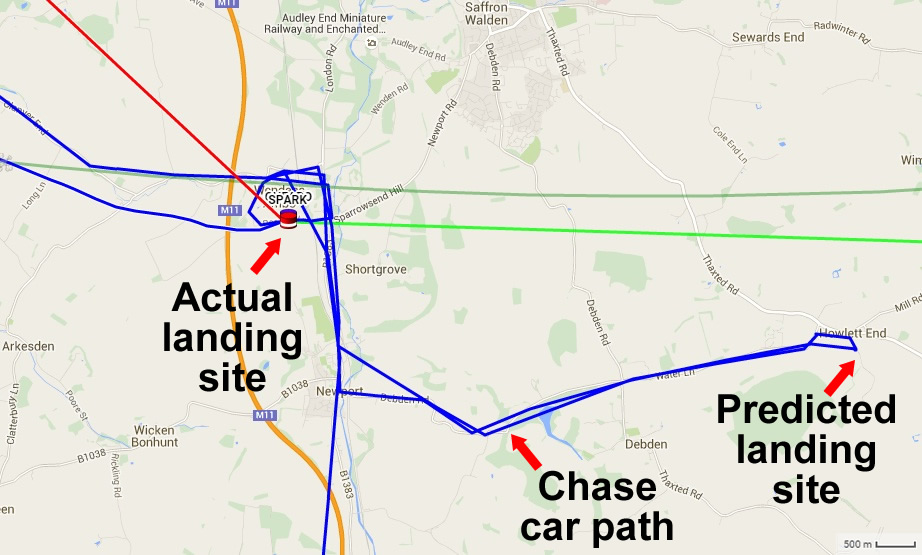
We were greeted by Steve and his cameraman, who had already had time to locate the payload and set up their live stream before we arrived. The payloads were sitting happily on the ground, with the parachute caught up a tree dangling most of the balloon remnants below it. After a couple of tugs the parachute joined all 3 payloads in their successful recovery.
Keen to investigate what happened to ECC1, we headed back to Essex to carry out some debugging. On recovery neither of the OK or WARN LED’s were lit on the board. The camera LED was however still flashing, and had stored images of the entire flight on its SD card. Voltage readings were normal. On closer inspection I found that the SDA wire for the BMP180 sensor had broken at the solder joint to the PITS PCB. After soldering this back on and simulating the breakage, the PITS tracker program once again crashed and dropped to a single carrier. I also found that the micro SD card was very lose in the low profile micro SD adapter I was using. It could easily be pulled out by dragging your finger across it (despite remaining in the “locked” position), More hot glue required.
I’ve reported these findings back to Dave Akerman and he is hoping to release a software patch by the end of the week. I think it would then be wise to carry out a small repeat test flight (perhaps on a 100g pawan) just for a little more confidence.
A recording of Steve’s entire live stream can be found here, along with all of the pictures of the flight recovered from the SD card here.