The Launch
The morning started off a little frosty as we packed kit into the car and ran final tests on the payloads. NSE was performing normally but CHEAPO would not parse on Habitat. This was down to incorrect padding of the time (it was being sent at “64500” instead of “064500”). After a hotfix being applied to Habitat (Thanks DanielRichman) we were set up and ready for business.
![8665483537_6a20713a5f_z[1]](https://chris-stubbs.co.uk/wp/wp-content/uploads/2013/04/8665483537_6a20713a5f_z1.jpg)
The payloads were tied together and the balloon filled, before being released.

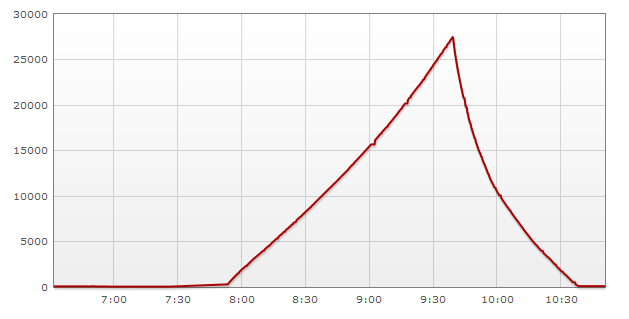
The balloon then climbed at an average of 4.3m/s to 27500m, before bursting and falling back to earth at an astonishing rate.
The Recovery
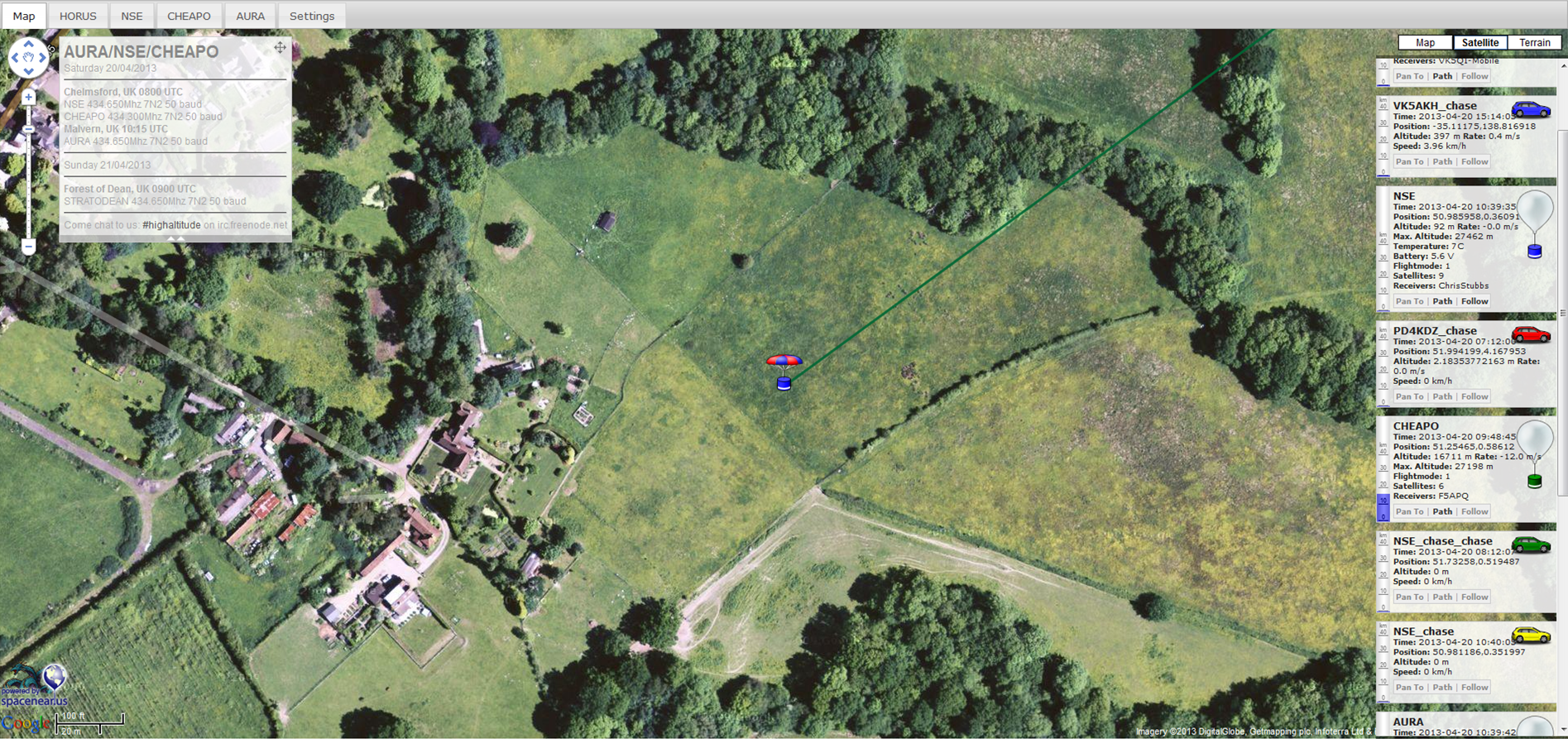
We drove to the landing site near Burwash and looked around as the balloon flew right above our heads on the tracker. I saw the faint shadow of the parachute on the horizon and headed across the town to the opposite side of the Forrest it was expected to land next to. After a few minutes of walking around with the radio we knew we were close. After speaking to one of the locals they let us climb over their fence to retrieve the payload from their field.

Post flight analysis
The balloon burst was predicted to be around 21000m so we were surprised and slightly worried as it carried on climbing all the way to 27000m. This was probably due to the balloon being slightly under filled as our average ascent rate was below target.
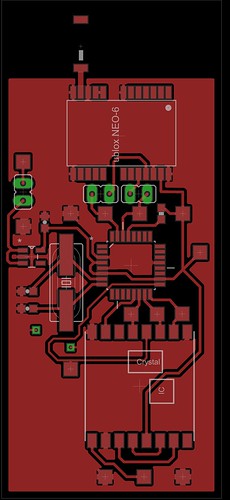
Cheapo’s GPS code worked fine. Maintaining a fix of 9 satellites throughout the flight. The only software bug being the padding on the time field, which has now been resolved so should not pose a problem on future flights. Cheapo only had a couple of receivers over its flight, who reported a very poor signal from it. I believe this was due to the radials of the 1/4 wave antenna being bent over the driven element. The next flight will use straws to prevent the radials from sagging or bending out of shape.
NSE’s signal was perfect, with about 20 simultaneous receivers at one point. The antenna reinforcing (straws) paid off and the payload could be heard from a fair distance away on landing. The path on the tracker appeared to jump to 0,0 at one point. Upon analyzing a data export from habitat that evening I found that the payload was having difficulty getting strings from the GPS module on several occasions, reporting back 0 connected satellites and falling back to the last know coordinates. This was most likely down to using Software Serial.
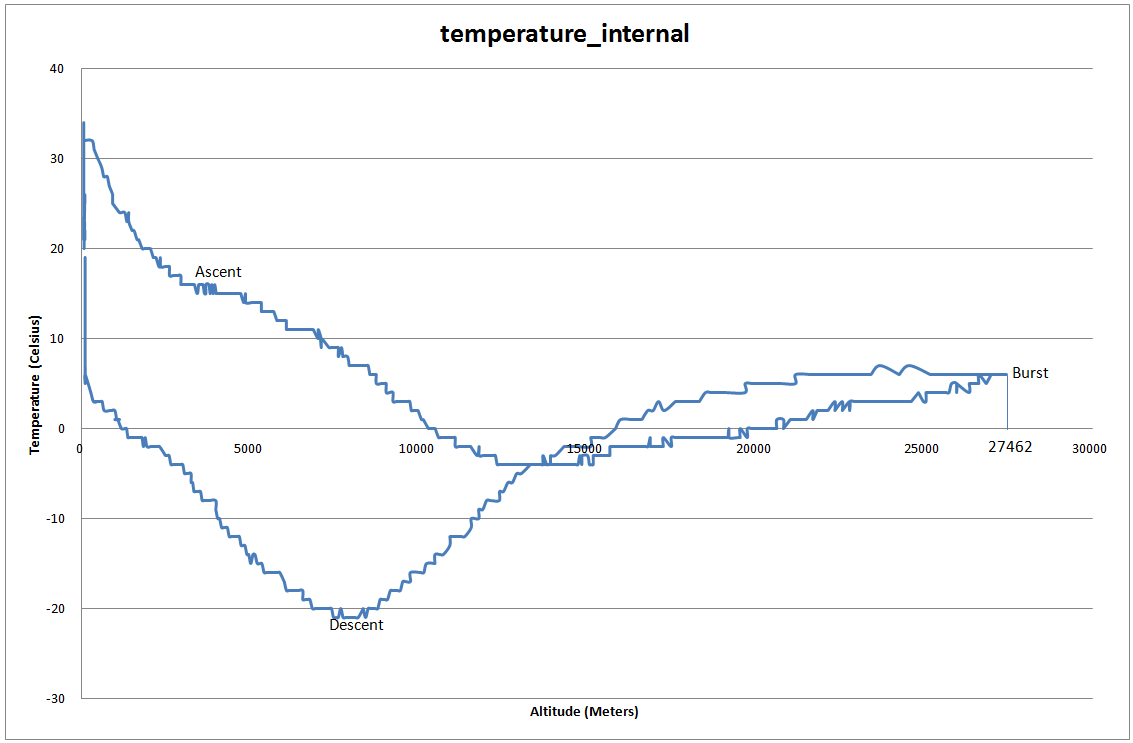
Temperature data was collected using the AtMega168’s internal sensor. The payload got down to -20C on its descent with no problems
The TK102 tracker we flew as backup did work in the end, however was probably not worth its weight as the firmware on it is horrible and proves very unreliable.
Overall the flight was a success, and I am very happy we managed to recover it okay. We are hoping to fly again with a better camera soon, and also try and fly CHEAPO on its own, either as a floater or with a pico balloon.