CHEAPO2 – My second balloon launch – Sunday 5th May 2013
After my first launch of NSE we still had another balloon and some helium left over, so we planned for another launch using only one tracker, but a proper canon camera this time.
We went up to Cambridge to meet Steve Randall at the EARS rocket launch site. It was nice to see some of their big rockets going up (despite one landing worryingly close to our balloon whilst filling it).
The wind picked up a little so we decided to reel the balloon back in and try Steve’s “Hail Mary” launch technique. This pretty much consisted of releasing the balloon upwind of the payload, letting it take up the slack, then throwing the payload into the air! As scary as it was to watch it worked very well.

You can just see one of the rockets being collected that landed very close to us in the photo below:

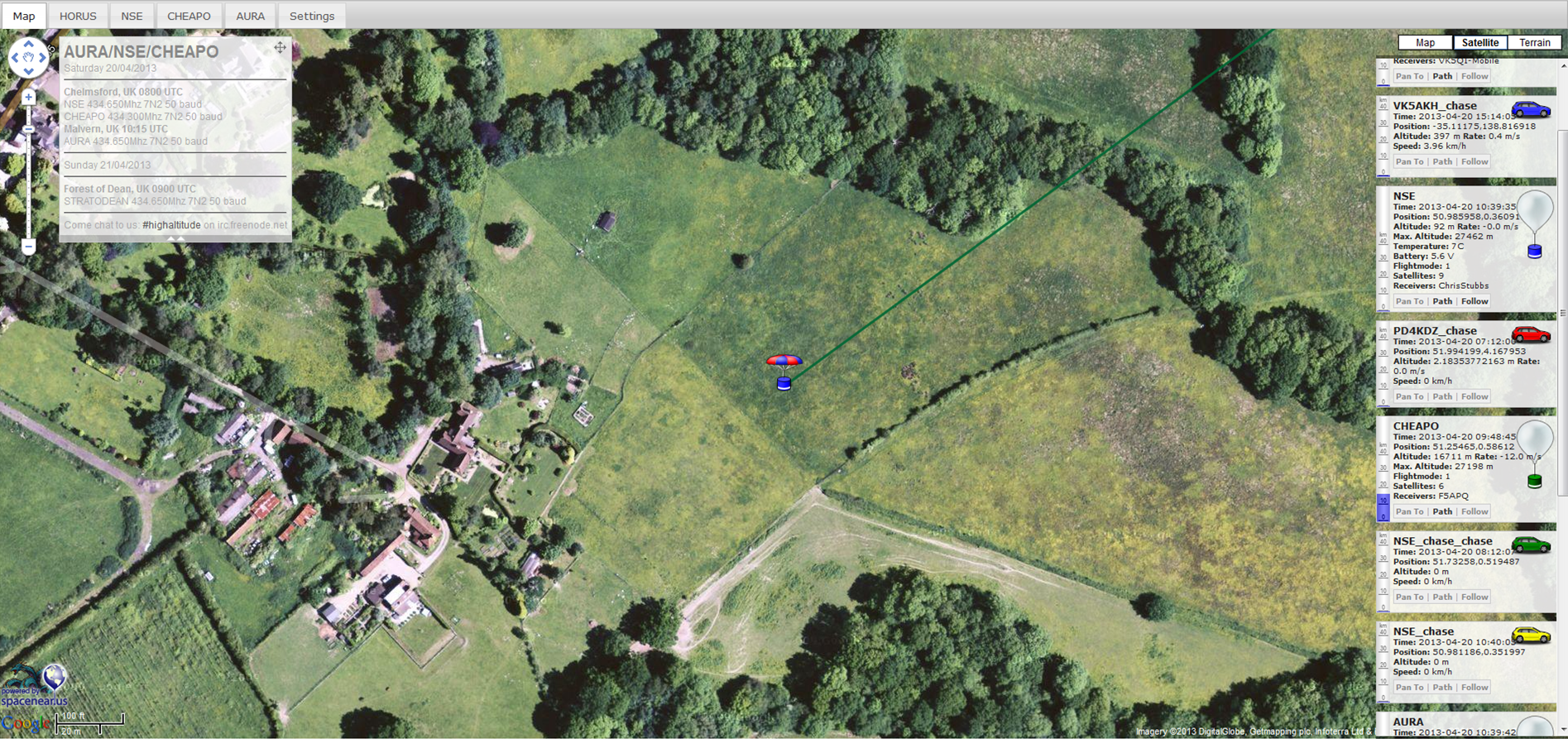
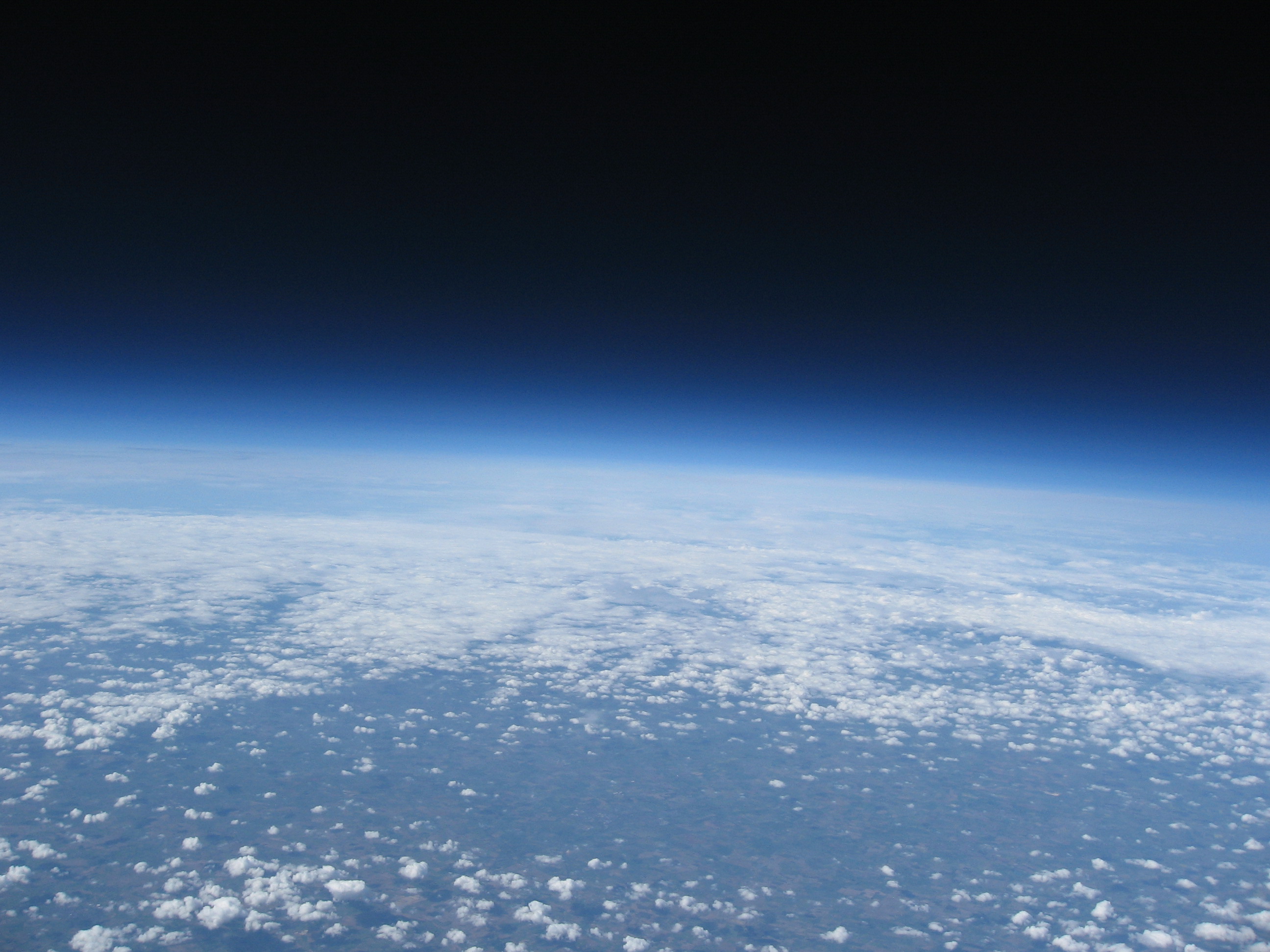
The flight covered about 20 miles as the crow flies and reached and altitude of 24.5km
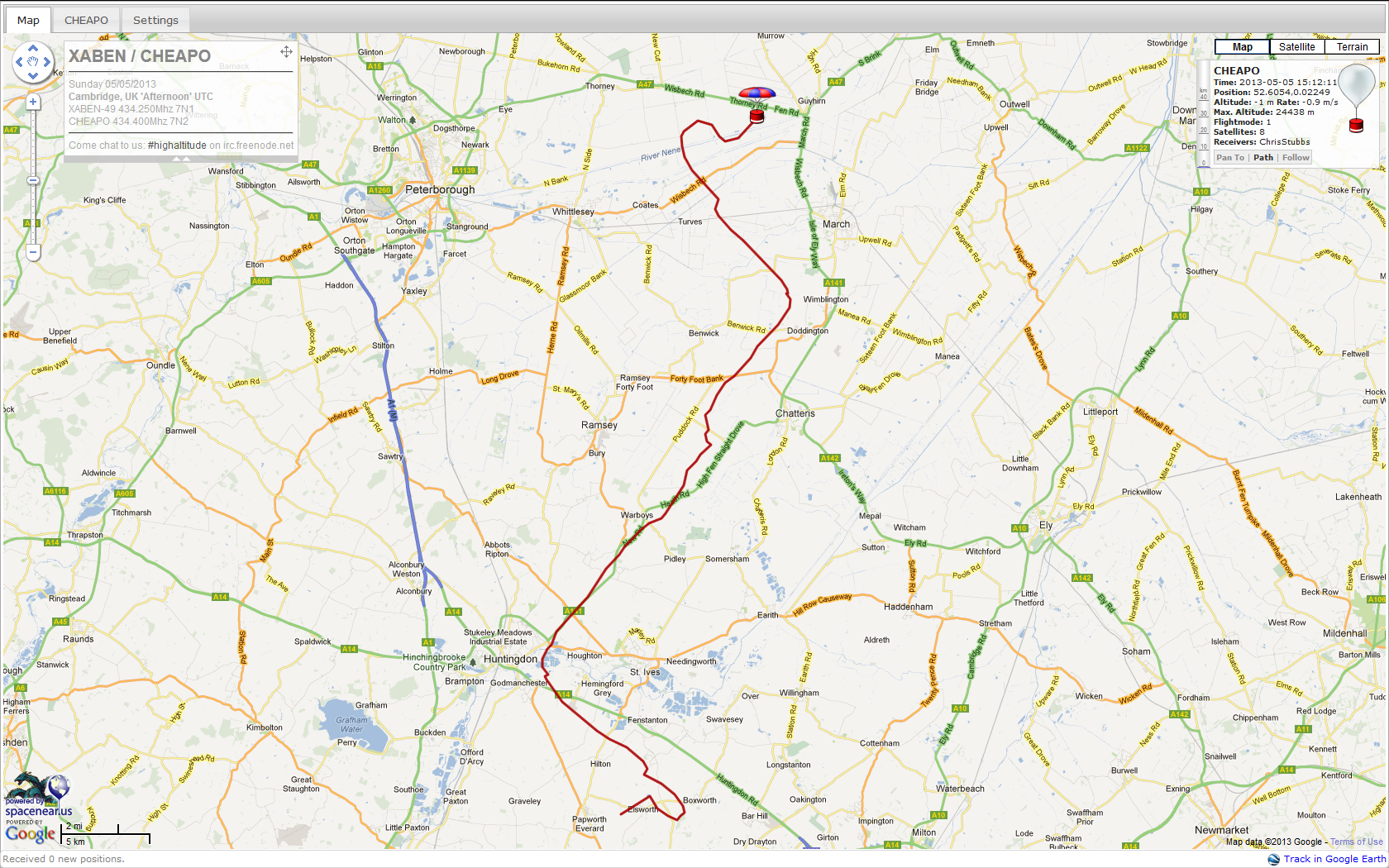
Flight path of CHEAPO
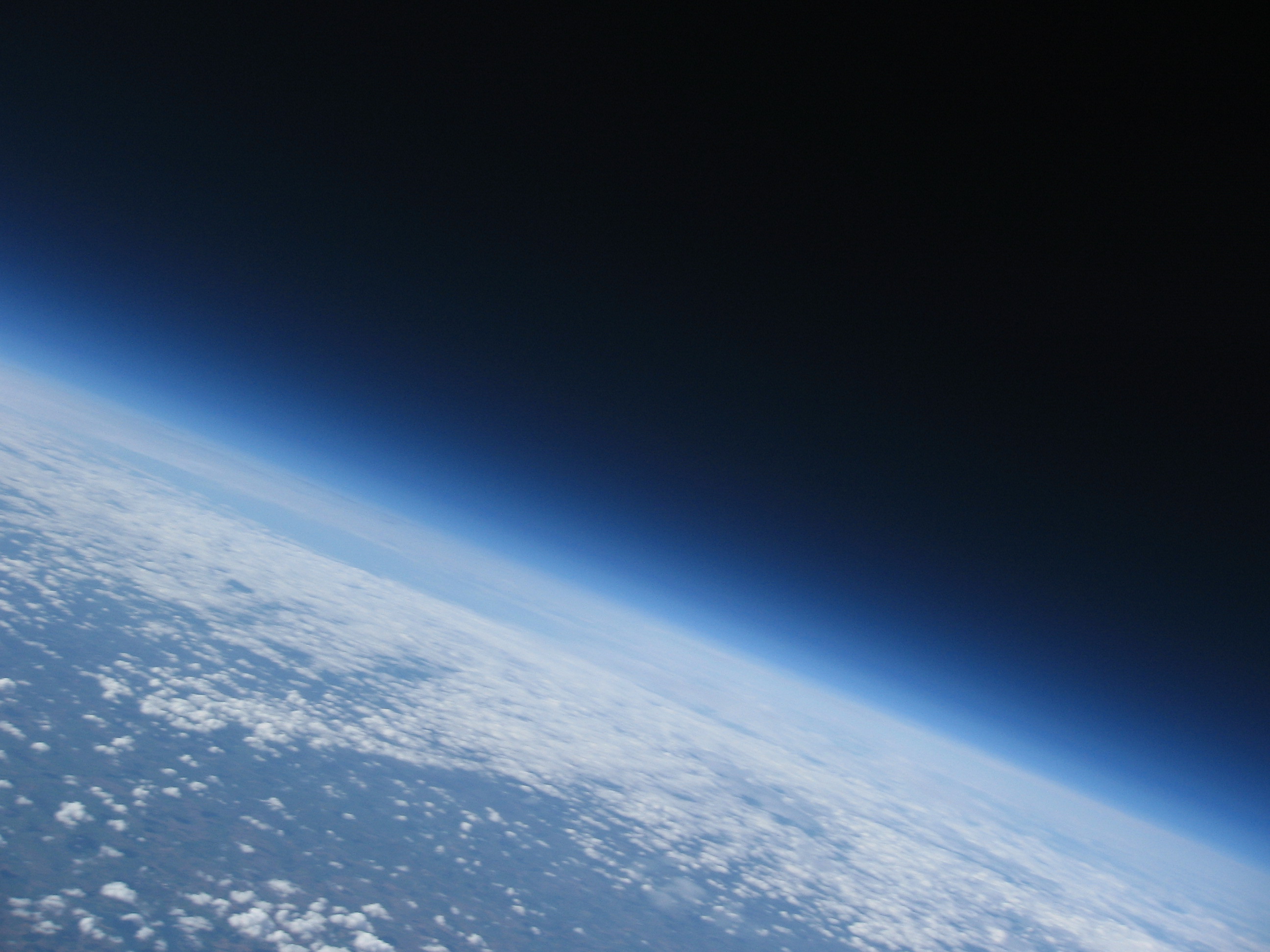
The Canon A530 camera worked a treat, although my DIY 4x AA battery holder failed just before launch. I popped just 2 lithium’s in the camera but they still lasted the entire flight!
Here are a few photos:












The recovery was nice and easy. We sat around near the predicted landing site with a great signal on the 5/8 magmount, switching to the 3 element yagi when it hit the ground.
The signal was extremely faint on the ground as the antenna got squashed flat on impact! After hunting around with the yagi we got one decode and set off on foot after it.

CHEAPO in flight 808 cam video:
Post flight write up:
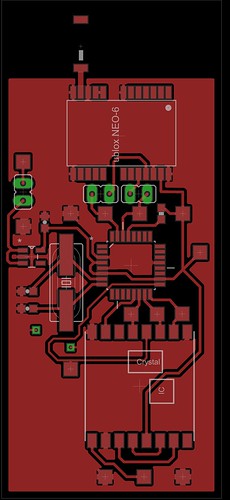
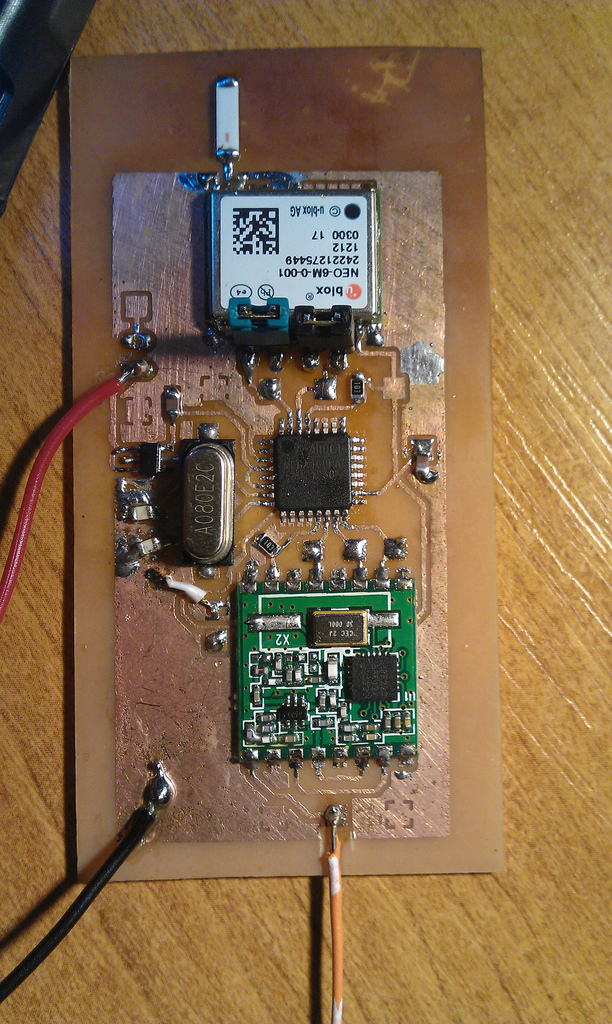
The 300g mil surplus balloon expired in 2010 so I am happy we got a decent altitude out of it! However the transmission power was once again very poor. It has been suggested this could be down to a problem with the PCB track on the board, or a faulty RFM22B transmitter module. I will turn the output power right up to hopefully achieve 10mw ERP and do a flight soon to send the CHEAPO prototype to its grave in the skies! Proper boards will be ordered from the board house very soon 🙂
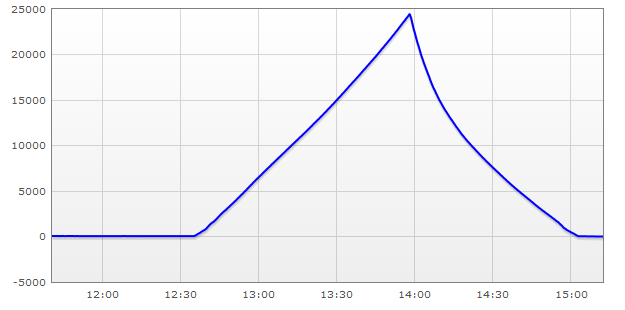
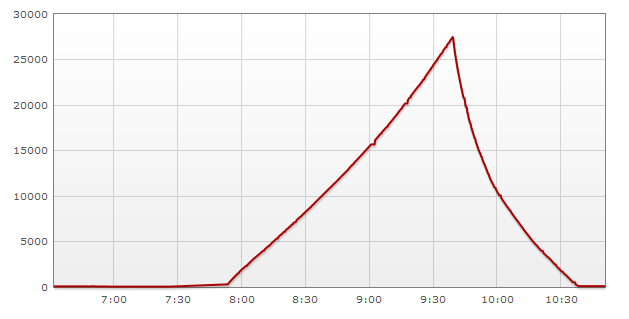
CHEAPO2 altitude/time graph.
![8665483537_6a20713a5f_z[1]](https://chris-stubbs.co.uk/wp/wp-content/uploads/2013/04/8665483537_6a20713a5f_z1.jpg)