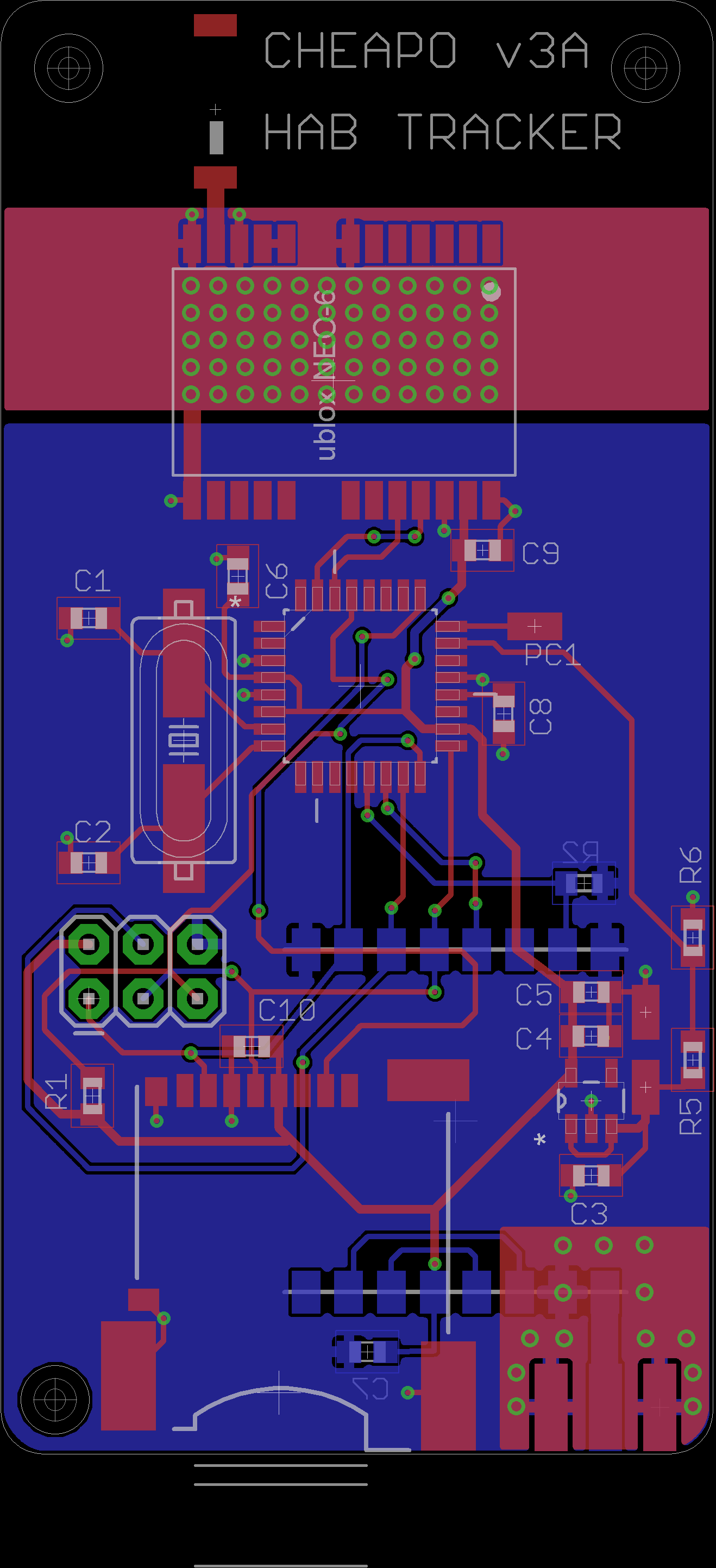
After the disappointing signal reports from cheapo3 I decided to investigate the cause of this. The most efficient, fast and cost effective way of doing this was obviously to just build up a new board and launch it. This also gave me a chance to play around with foil balloons which seem far more suited than small latex for this sort of payload.
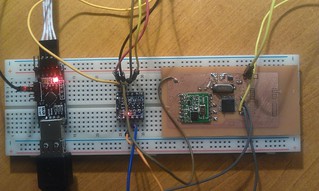
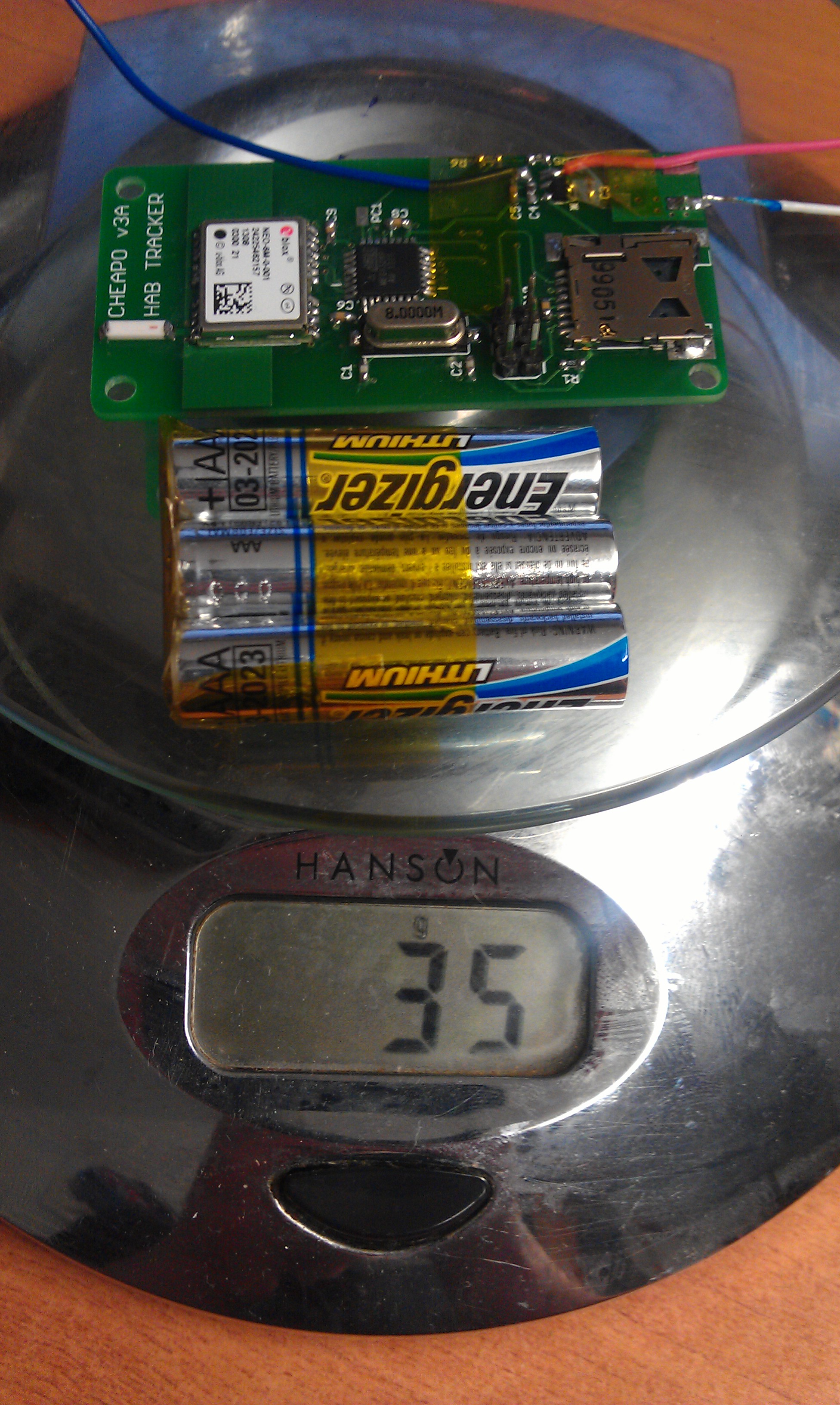
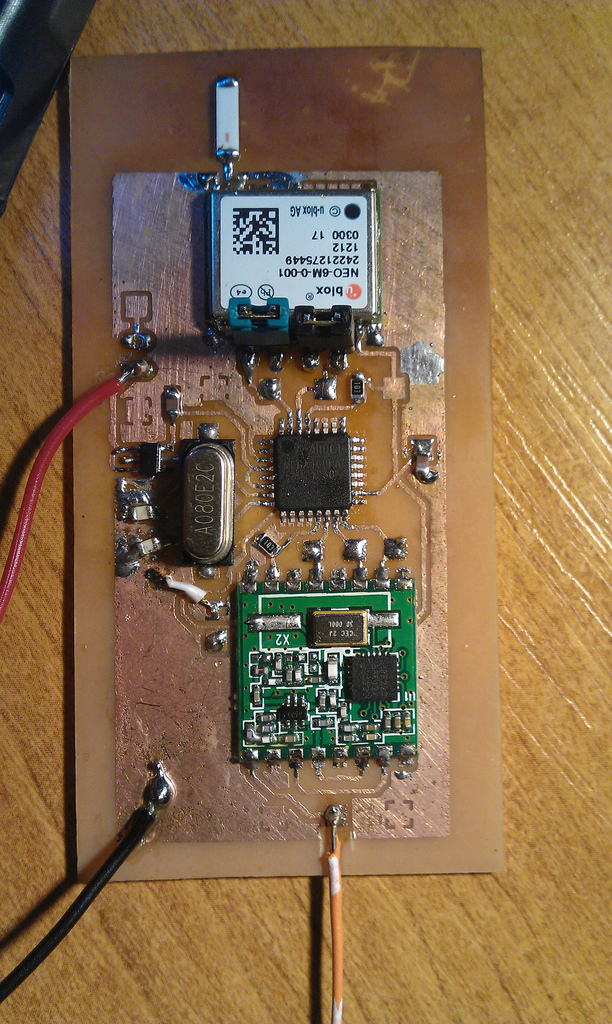
I made the 1/4 wave antenna using cat5 cable instead of telephone cable this time around and it seemed to make all the difference! Had lots of great signal reports and a fair few trackers. The software had also been updated with some power saving code dropping the current down to 50mA, and a distance from launch site calculation added. The tracker complete with batteries and foam box weighed in at about 40g.
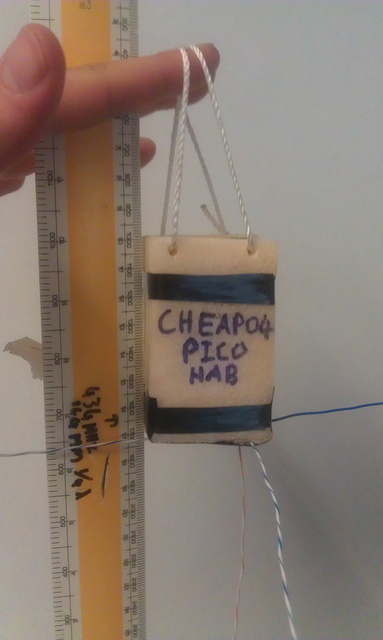
I aimed for a fairly low ascent, but by just measuring this by eye in quite a confined space (my garage) it was probably a little on the overfilled side. I cannot imagine having to fill one of these outdoors!
Instead of using a plastic tube for filling I simply opened the valve using a drinking straw then filled the 36″ qualatex balloon using the filler nozzle on a disposable 50 helium canister.
I filled 2 small latex balloons to use as wind indicators and to test for tree clearance. Just as well as the first one got stuck!

Launch video:
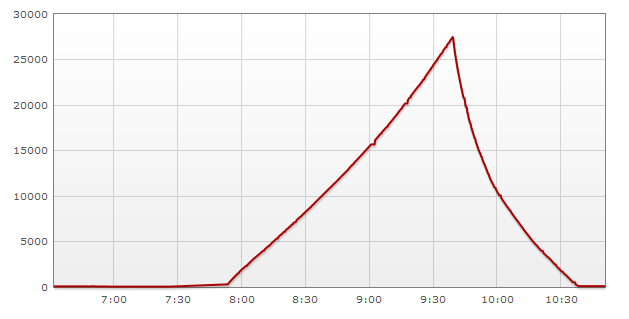
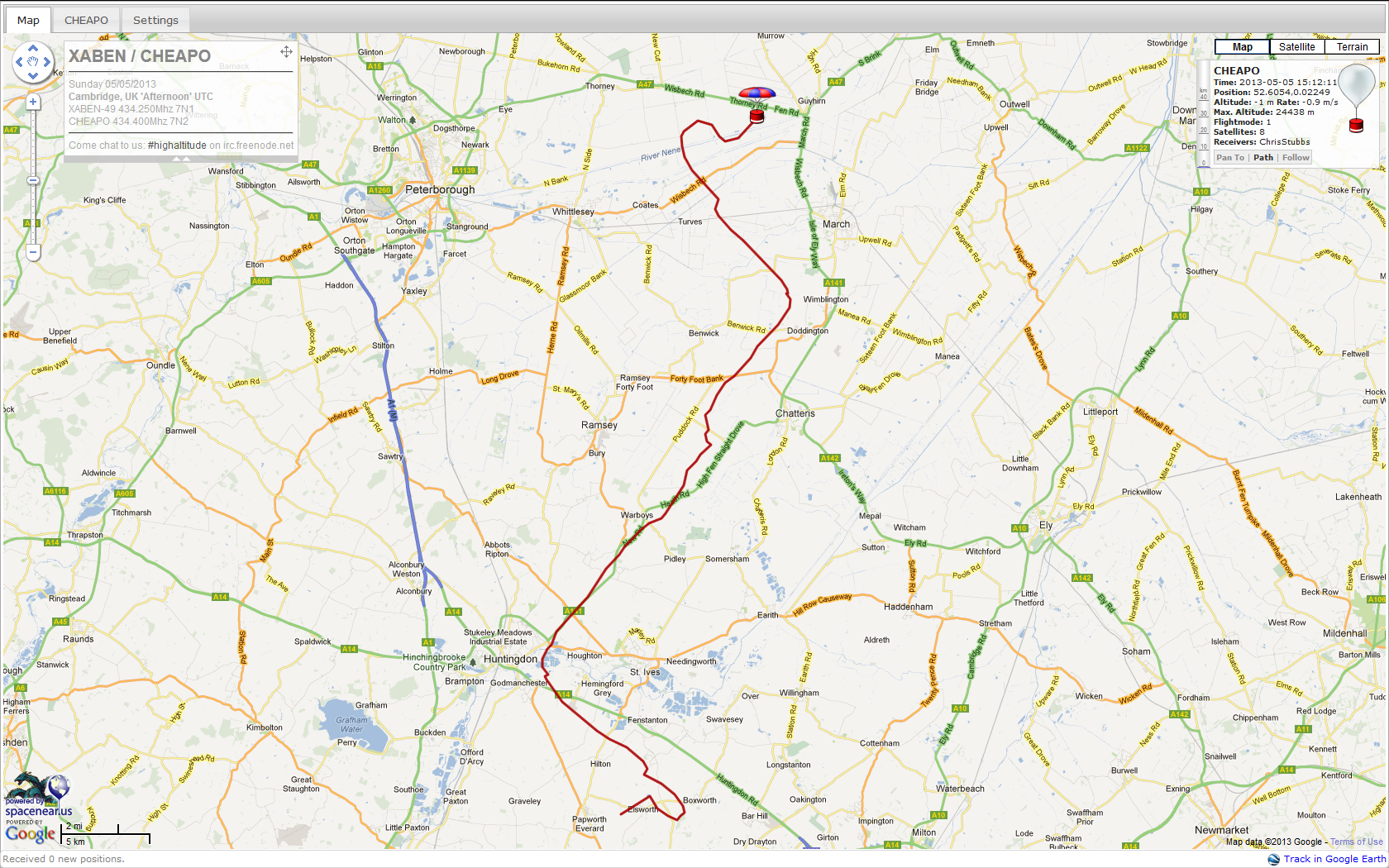
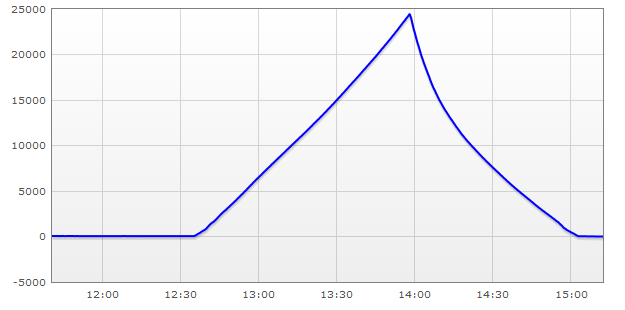
Unfortunately the balloon did not enter a float despite its fairly slow ascent rate. At about 5400m the balloon started to leak gas. This looked like it was leveling off for a float. But then started to descend at about 1.1m/s.
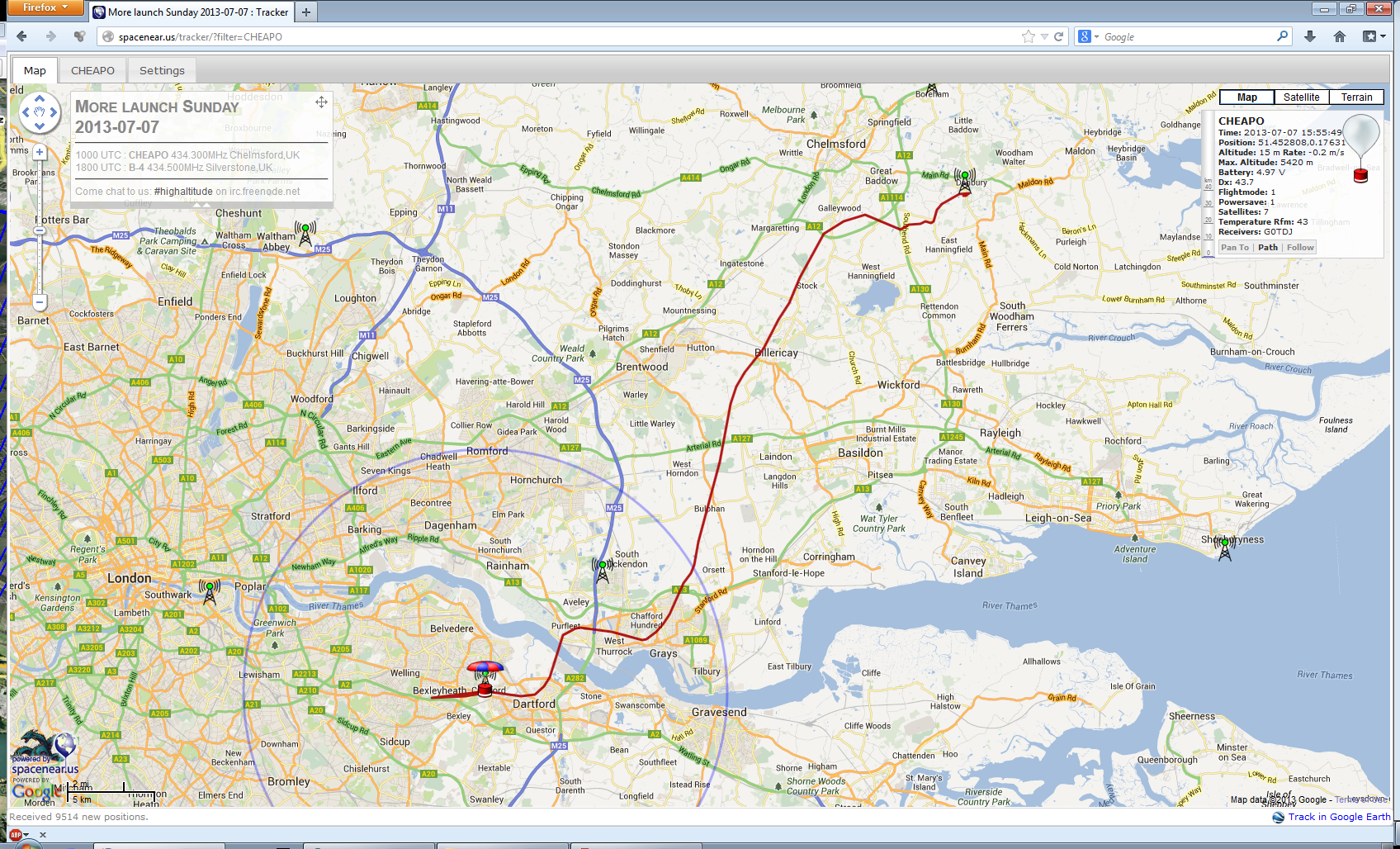
As the balloon descended I tried to decide if I should go to recover. My inverter went missing and I doubt my old laptop would have lasted long enough to be worthwhile. I sat there and watched as the balloon crossed the River Thames and bounced along between 100-200m altitude as it rode thermals over the town.
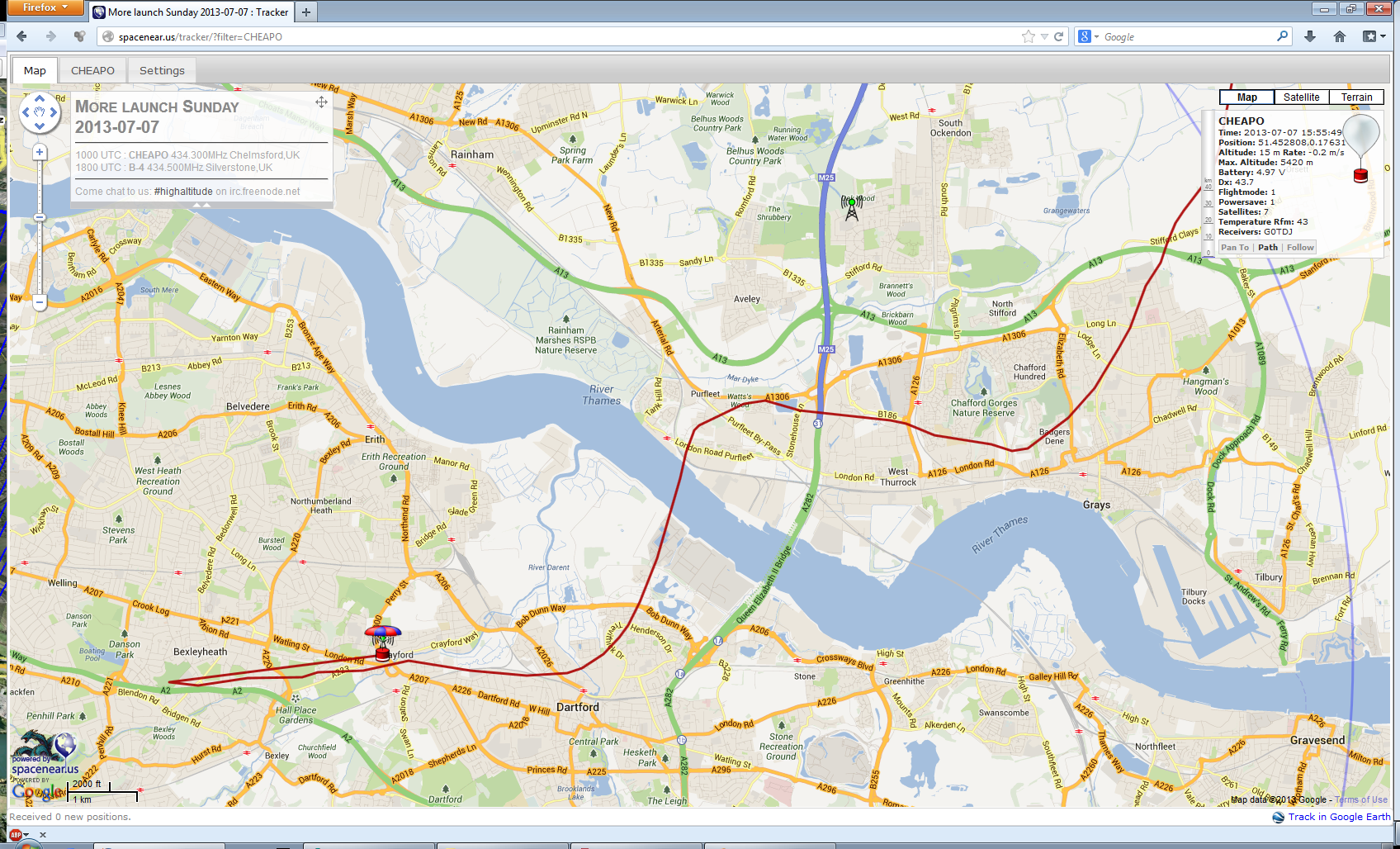

We lost contact with the payload at about 60m altitude over Bexleyheath golf club. Just then Steve (G0TDJ) stepped in to save the day! With his mate Ken at the wheel, they drove down to the golf club to take a look around. After a few minutes with nothing seen, one of the golfers pointed them in the direction of the A2 (eek!). Luckily it seems that the balloon was blown to the side of the road by the traffic and up onto the fence.
Steve caught a passer by just in the nick of time to pass the balloon over the fence to him after convincing him that the payload was NOT in fact a bomb and he did NOT need to call the police! A close shave!
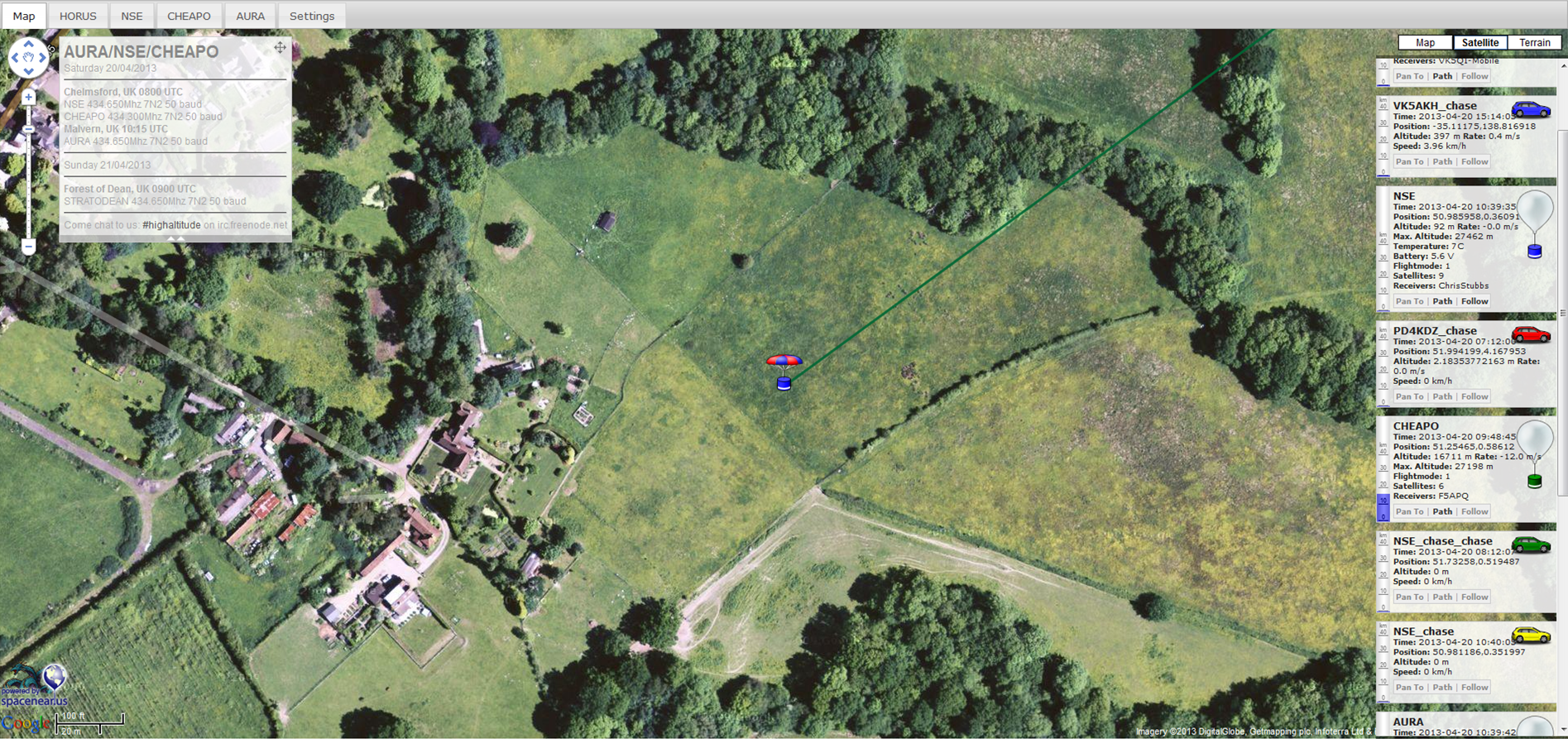
As you can see below the payload had landed directly below the tracked position. I can only presume the balloon floated further on and was blown back down the road, or the wind was directed downwards due to the shape of the trees.

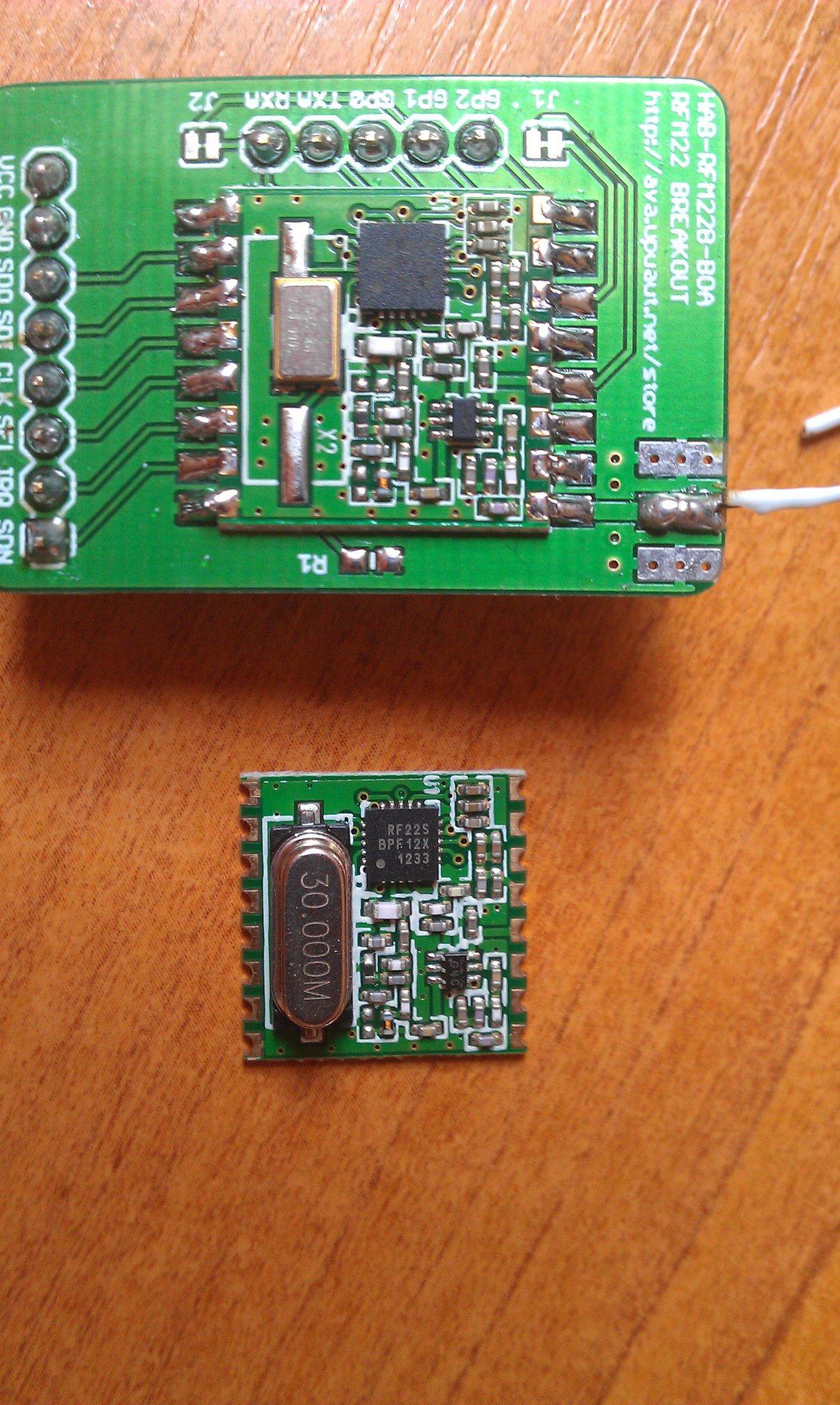
So all in all a successful flight. The new antenna is tried and tested. I have some experience with launching foils. The HC49 RFM22B showed slightly less drift than usual, I will be interested to investigate that one further.
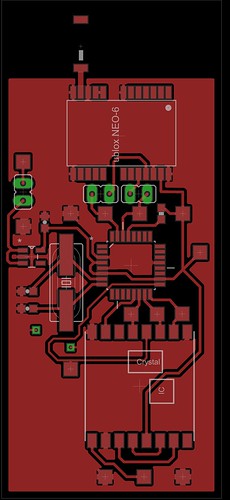
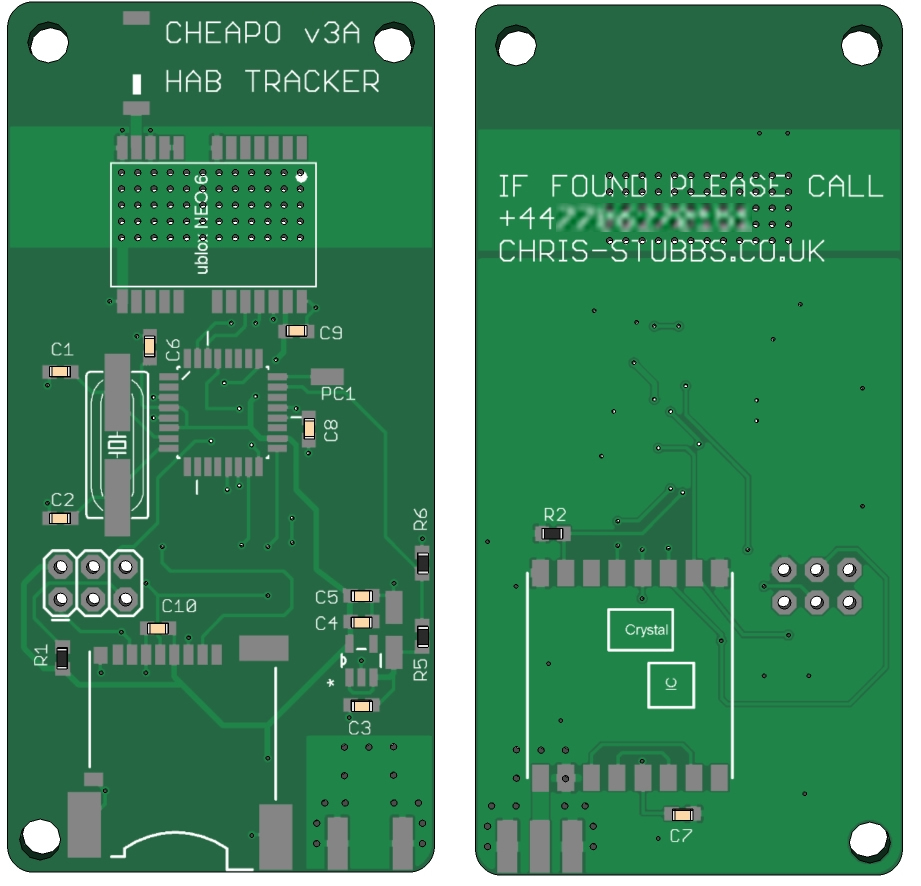
Comparison of RFM22B’s (Standard HABsupplies on top, alibaba board on the bottom)
Thanks again to all those who helped track, and an even bigger thanks to Steve and Ken for going out to recover! CHEAPO5 to follow sooner than you may think 🙂

















![8665483537_6a20713a5f_z[1]](https://chris-stubbs.co.uk/wp/wp-content/uploads/2013/04/8665483537_6a20713a5f_z1.jpg)