I wanted to test the new cheapo4 board at altitude to see how well it worked, but to comply with the <2m rule I could not use a standard 100g balloon (http://randomsolutions.co.uk now stocks a 100g that complies with this rule, which I look forward to testing soon).
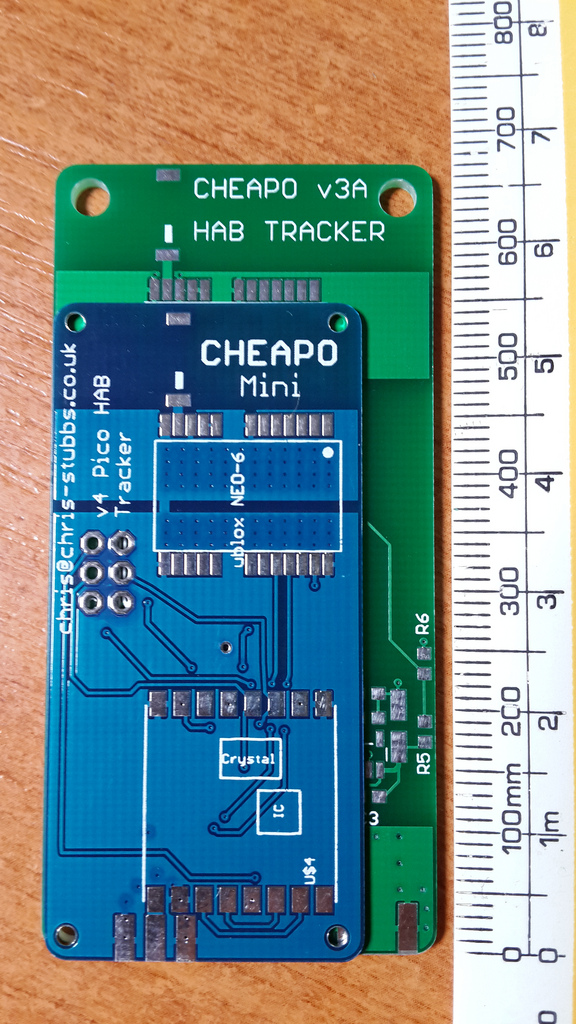
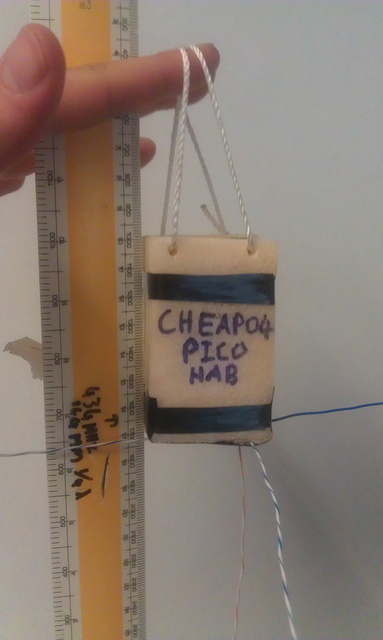
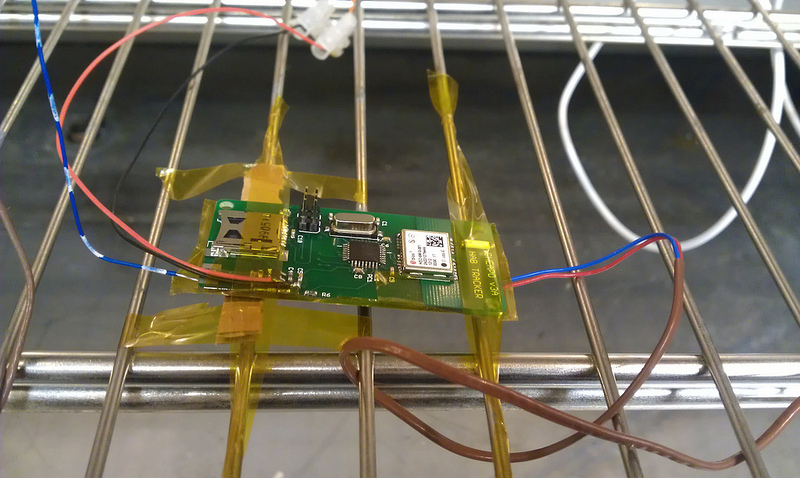
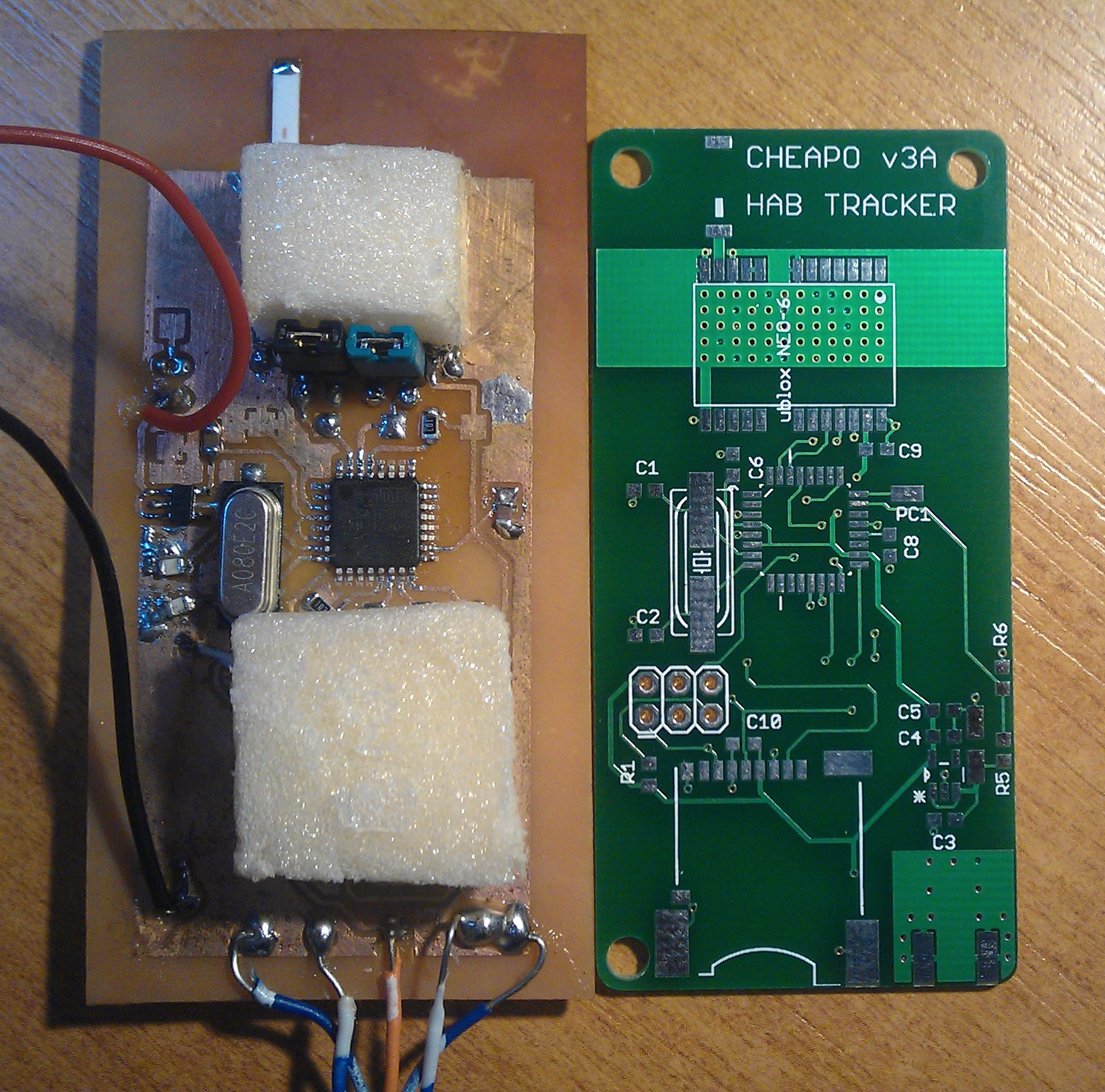
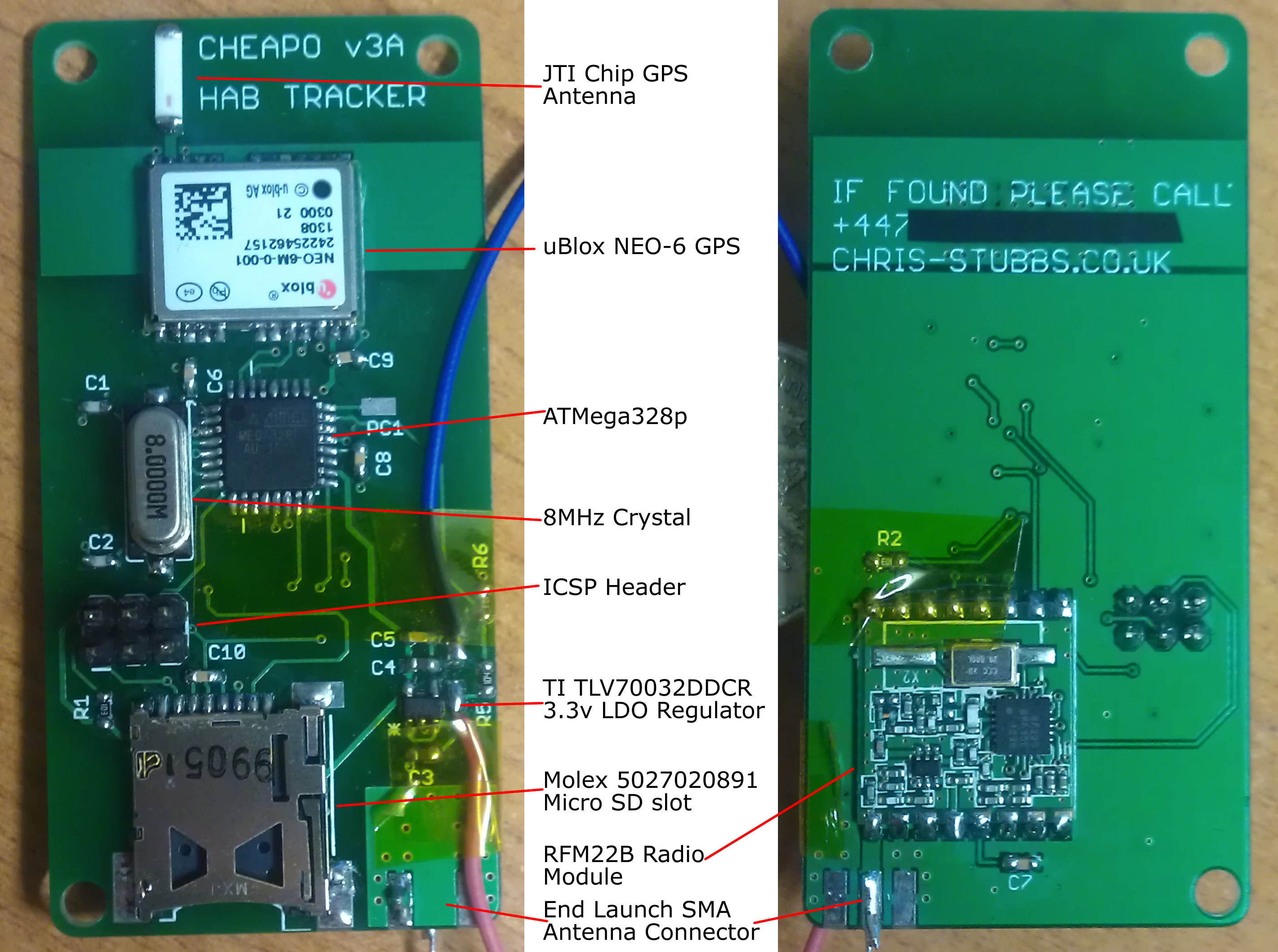
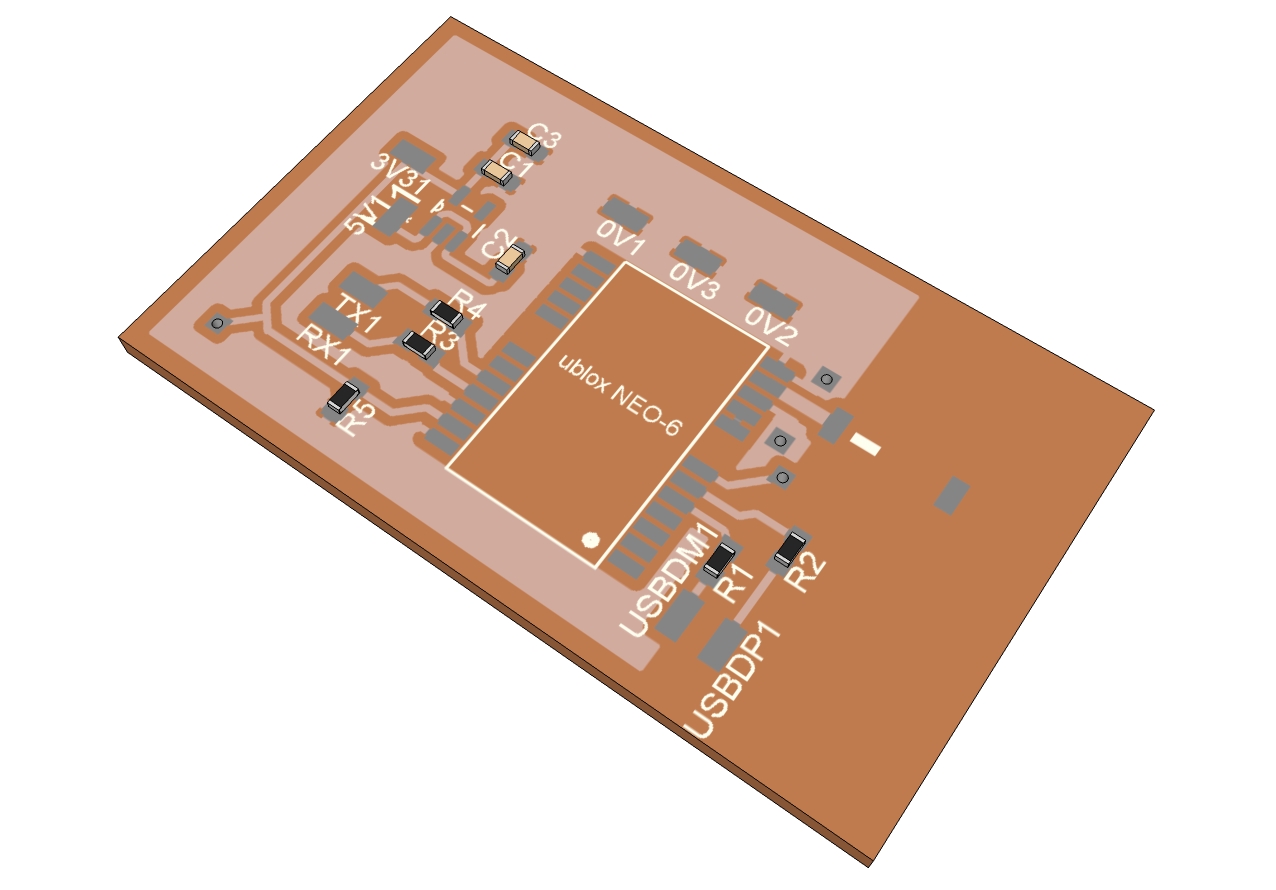
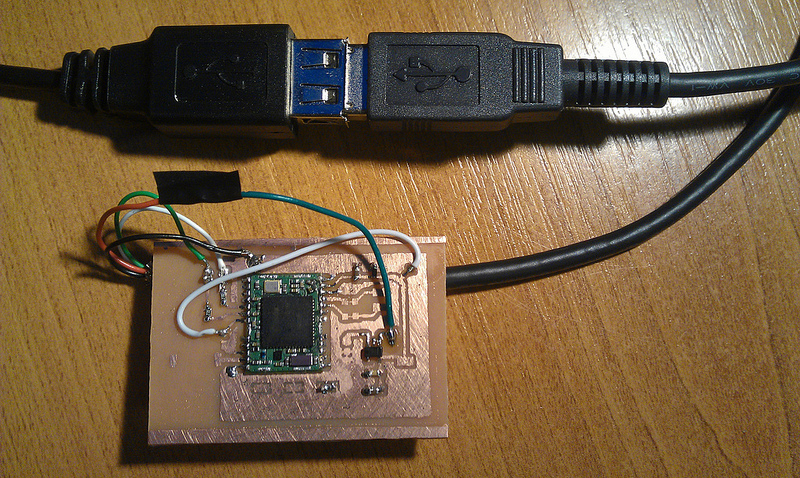
After picking up some 36″ party balloons from ebay and testing their burst diameter. I discovered they burst at about 1.2m, well within the limit. The new cheapo4 board was assembled and tested a few days before the flight, and again the night before the flight and worked fine. However once the balloon was filled and the payload attached it refused to get a GPS lock! After hours of moving things around, making sure the battery was out of the way and breaking out the ublox tx pin. I found that it was reporting back 0 satellites with the odd 1 popping up now and again. Not good.
With some more tweaking and still no luck we gave up, but determined to still launch something I pulled out an old cheapo3 board. This too refused to get a fix for some time but eventually came to life. We attached it to the already filled balloon and promptly launched it.
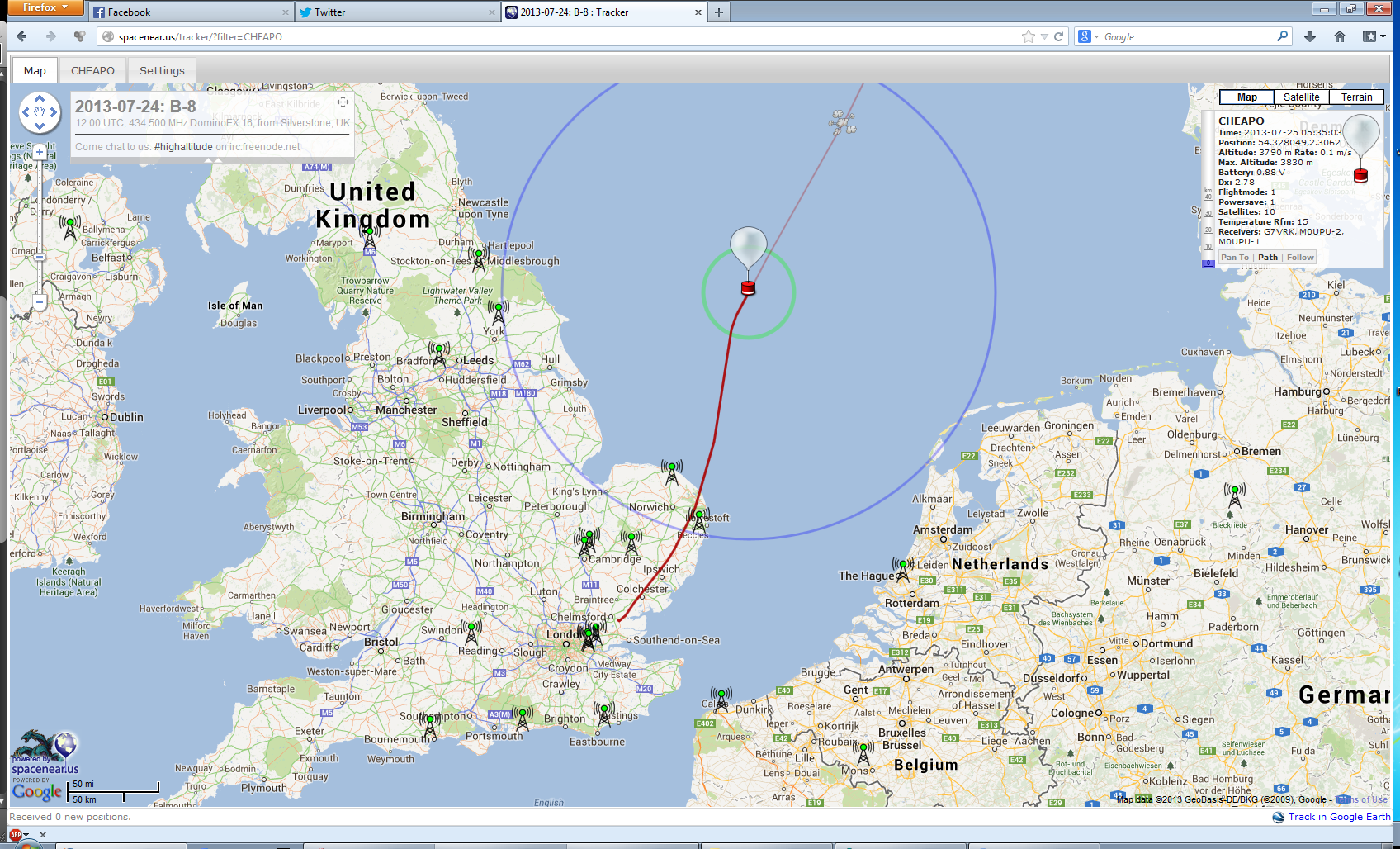
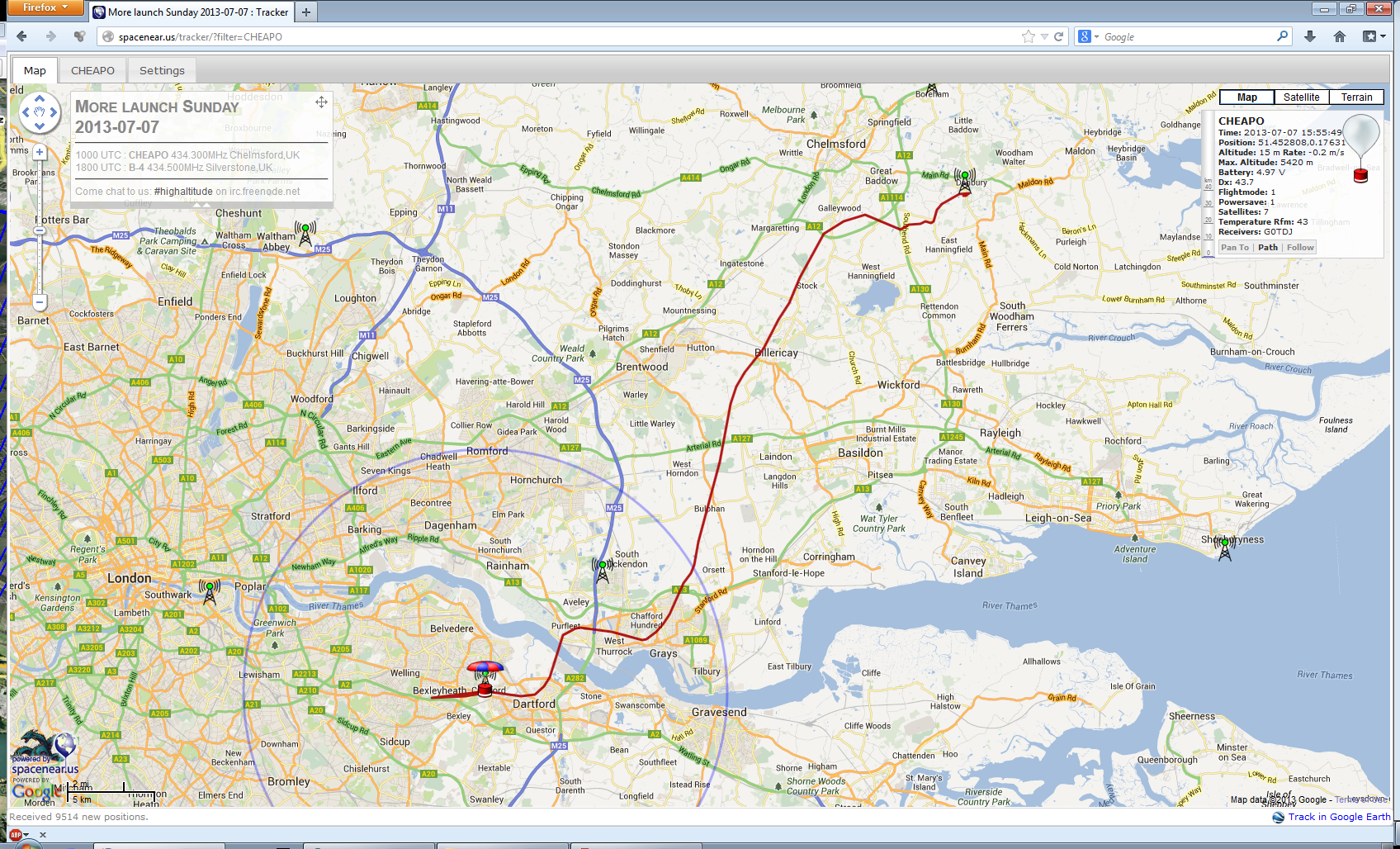
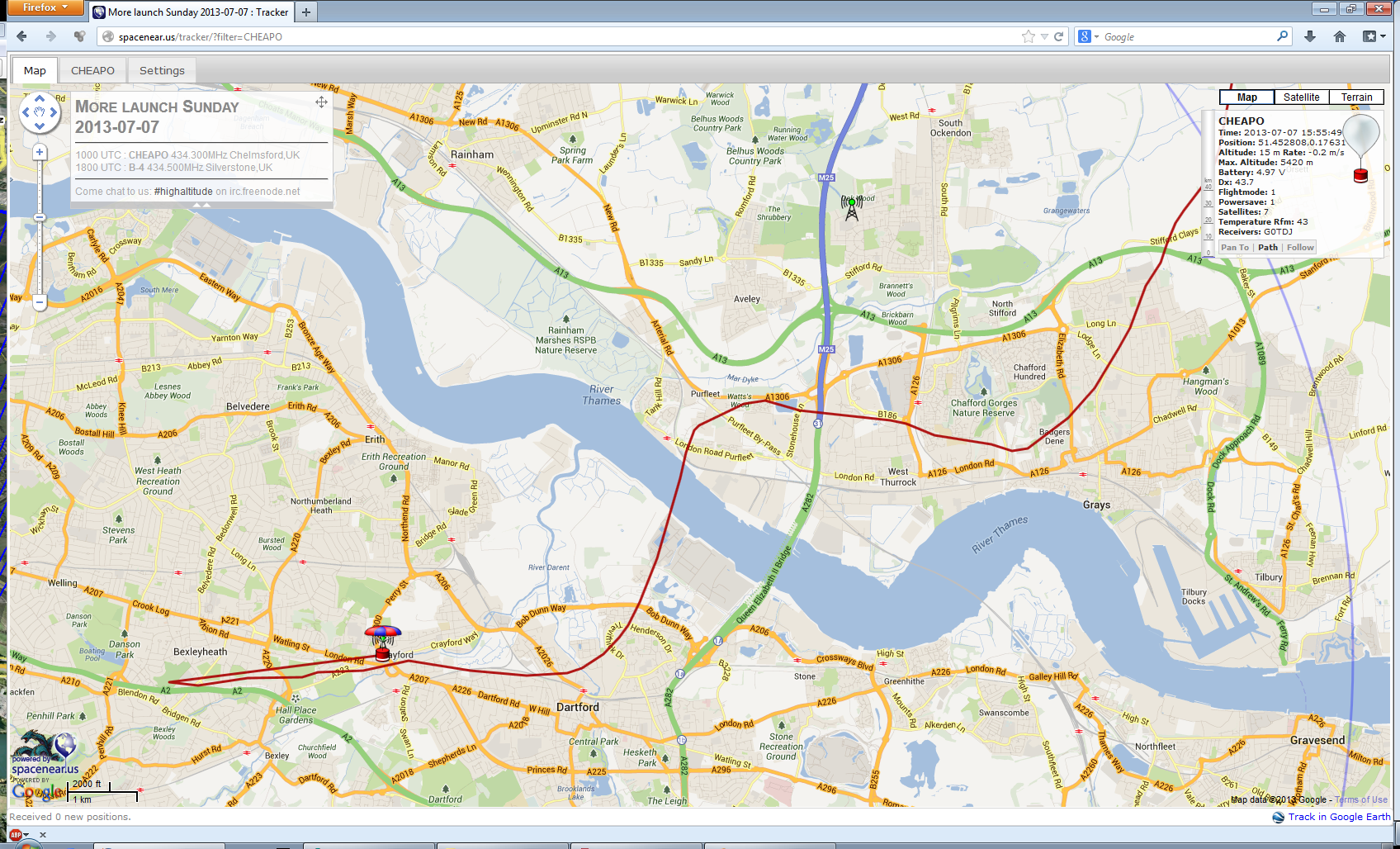
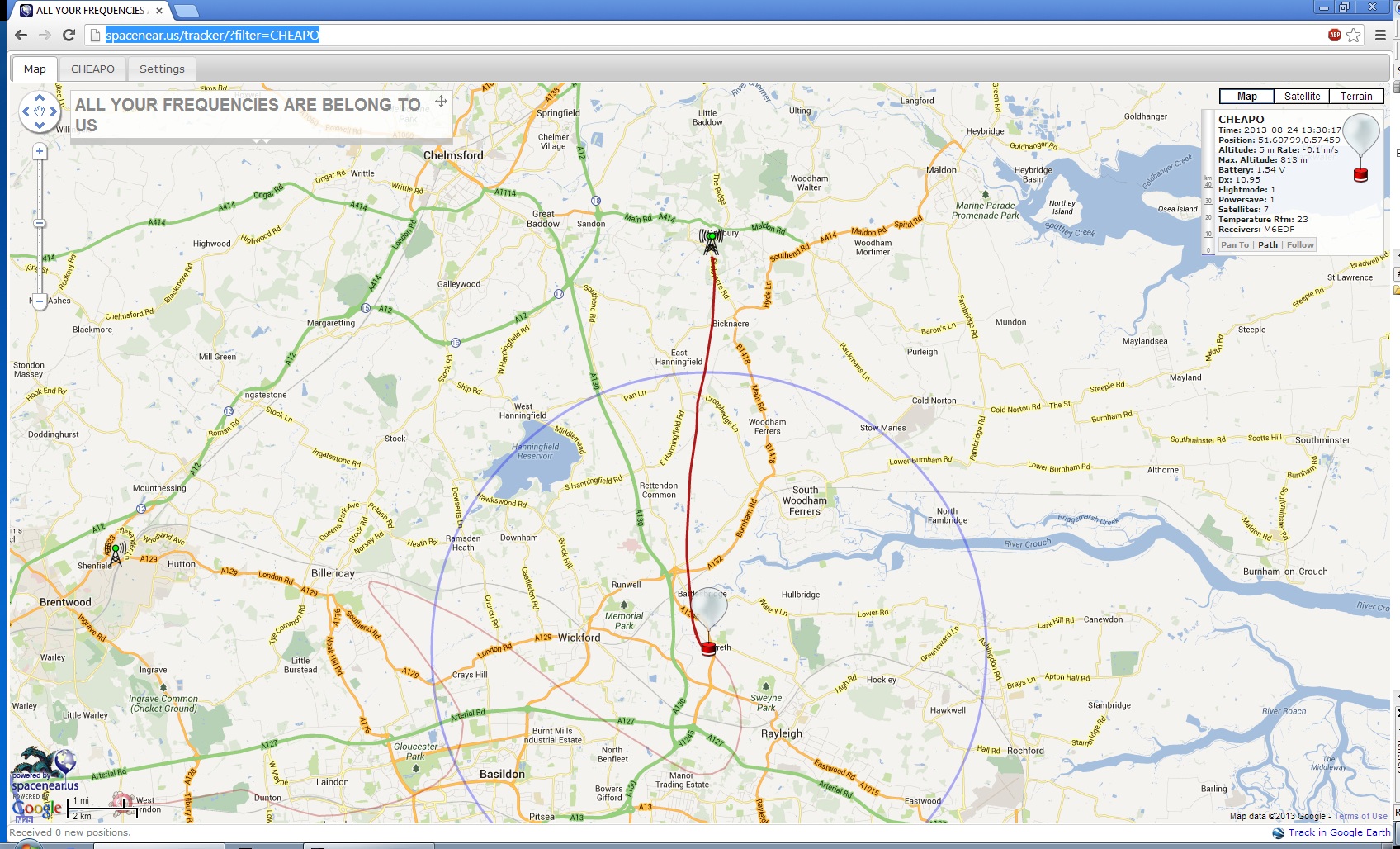
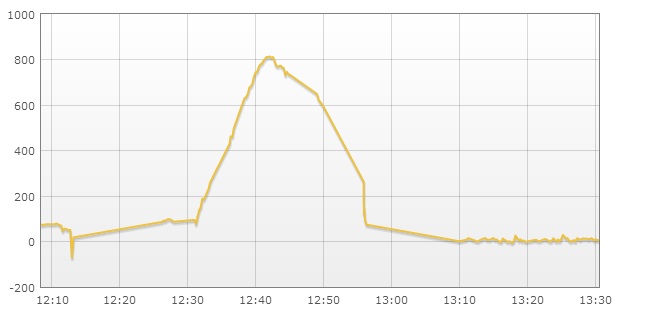
We began the chase , but after what seemed to be no time at all the balloon’s ascent rate started to drop. I thought this could have just been it struggling to break through a layer of cloud but after reaching a grand 813m altitude it started to descend again at about 1.5m/s.
A little disappointing we headed to the landing site and recovered the payload, which was sitting in the middle of a soaking wet corn field (easy recovery none the less).


The cheapo4 tracker seems to have come back to life today, I have no idea what the problem was.. Just hope it doesn’t happen again!
I will certainly try this type of balloon again as I have a few left. It probably just leaked through the neck as I only tied it off with one cable tie. Next time I will consider just sealing the balloon with a conventional knot.